- Dansk
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Variable Frekvensdrev Arbejdsprincipper, Kontrolmetoder og Applikationer
Katalog
Variabel Frekvensdrev (VFD) Oversigt
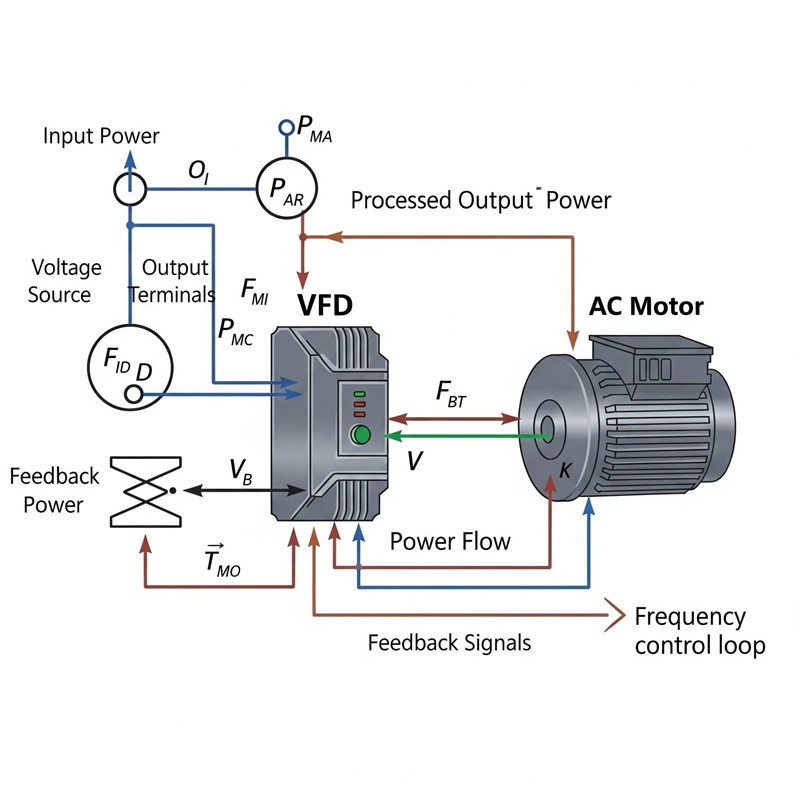
Et variabelt frekvensdreve (VFD) er en effekt-elektronikstyrer, der regulerer en AC motors hastighed og moment ved at justere statorens elektriske frekvens, samtidig med at den koordinerer udgangsspænding og strøm, så motorens magnetiske flux og momentproducerende strøm forbliver inden for et anvendeligt driftsområde. På produktionsgulvet viser det sig ofte mindre som en simpel "hastighedsindstiller" og mere som en disciplineret moment- og strømregulator, der tilfældigvis producerer den beordrede hastighed, når de elektriske forhold ved motorterminalerne holdes under kontrol.
For de fleste AC-motorer bestemmer den elektriske frekvens i høj grad hastigheden af det roterende magnetiske felt og motorens hastighed, idet induktionsmotorens slip skaber en lille forskel mellem de to. Når frekvensen ændres, justerer drevet spændingen for at opretholde den korrekte magnetiske flux. For lidt flux kan reducere moment og respons, mens for meget flux kan øge strøm, varme og støj.
Mange moderne drev kontrollerer også motorstrømmen direkte for at opretholde stabilt moment ved lav hastighed, under pludselige belastningsændringer eller når motorens egenskaber ændrer sig på grund af temperaturvariation.
Ved idriftsættelse og fejlfinding er det almindeligt at have følelsen af, at frekvenskontrol burde forklare alt, indtil den første hurtige acceleration, pludselig deceleration eller belastningschok afslører hullerne. Dag-til-dag ydeevnedifferencer mellem drev viser sig ofte i kvaliteten af strøm måling, strømloop-tuning og hvor elegant drevet håndterer transienter snarere end i selve den grundlæggende frekvenskommando.
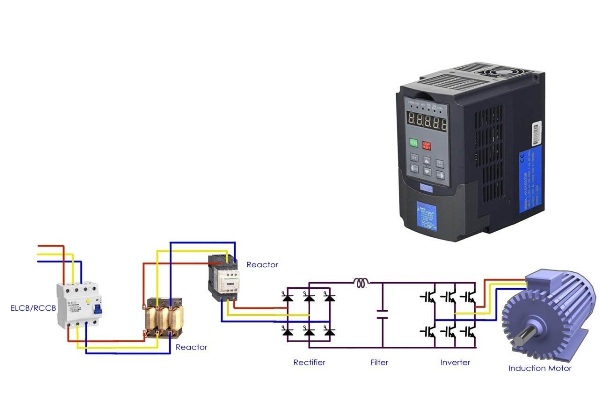
De fleste industrielle VFD'er bruger en AC–DC–AC struktur, fordi den har en tendens til at være robust, omkostningsbevidst og tilpasningsdygtig på tværs af en bred vifte af motortyper og driftsprofiler.
En front-end ensretter konverterer indkommende AC til DC. Den mest almindelige implementering på trefasede forsyninger er en 6-diode bro. Det omtrentlige DC-busniveau uden belastning er:
VDC ≈ 1.414 × VLL
Eksempler, der ofte ses i feltniveauer:
• 380 VAC trefase → ~537 VDC
• 220 VAC enfase → ~311 VDC
En diodebro er simpel og pålidelig, men den trækker ikke-sinusformet strøm fra elnettet, hvilket kan skabe harmoniske og øge stresset på svage strømforsyningssystemer. I nogle installationer kan problemer såsom unødvendige udløsninger, transformeropvarmning eller ustabil drift være forårsaget af interaktionen mellem harmoniske strømme og linjens impedans snarere end af selve motoren.
Almindelige afbødningmuligheder i industrielle paneler:
• Linjereaktorer (AC chokes)
• DC-link chokes
• EMI/RFI filtre
Ensretteralternativer, der nogle gange vælges for specifikke adfærd:
• SCR (thyristor) ensrettere til begrænset kontrolleret opladning (nu mindre almindeligt i nye bygninger)
• Aktiv front-end (AFE) der bruger IGBT'er til at forbedre effektfaktoren, reducere harmoniske og muliggøre regenerering tilbage til nettet
En praktisk måde at ramme beslutningen om ensrettere på er, at den definerer, hvordan driveren interagerer med elsystemet. Et overraskende antal problemer, der oprindeligt blev bebrejdet motorer, viser sig at kunne spores tilbage til input-side kompatibilitet og linjebetingelser.
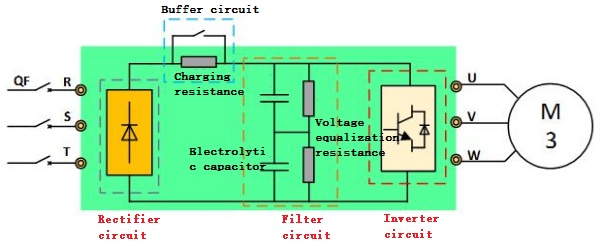
Ved opstart ser DC-link kondensatorer i starten ud til at være tæt på en kortslutning. Uden indstrømskontrol kan ensretteren og tilbagestrømsbeskyttelsen opleve et brat strømstød, der føles som et hårdt slag mod systemet. De fleste drivere løser dette med en foropladningsvej, der begrænser strømmen, mens bussen oplades, og derefter overgår til normal drift.
Typiske foropladningselementer:
• En seriemodstand i DC-bussen under opstart
• En bypass kontaktor eller relæ, der lukker, når kondensatorens spænding stiger
I virkelige installationer optræder foropladningsfejl ofte som intermitterende opstartsfejl, opladningstimeout-alarm eller kontaktor chatter. Almindelige årsager inkluderer aldrende foropladningsmodstande, slidte bypass-kontakter og undervalgsforhold under opstart, der forhindrer driveren i at fuldføre opladningsprocessen korrekt.
DC-linket glatter ensretterens ripple og giver kortvarig energilagring, når belastningen ændrer sig hurtigere end kilden kan reagere. Det inkluderer typisk flere elementer, der hver spiller en anden rolle, frem for en enkelt "ét stykke løser alt" løsning.
Typiske DC-link komponenter:
• Elektrolytiske kondensatorer
• Afladnings- og/eller balanceringsmodstande
• Nogle gange filmkondensatorer til højfrekvent ripple-undertryk
For højere bussens spændinger kan kondensatorer blive tilsluttet i serie. Da virkelige kondensatorer ikke deler spænding perfekt, tilføjes balanceringsmodstande for at reducere ujævn spændingsfordeling, der accelererer aldring og kan presse en kondensator ind i en tidlig fejlsituation. I servicearbejde kan en driver fortsætte med at køre med reduceret kapacitans, hvilket kan være misvisende betryggende; så begynder den at reagere skarpere på linjeskud, regenereringsbegivenheder eller hurtige belastningssteg. Den ændring i "tolerance" er ofte den første indikation på, at DC-linkets sundhed er ved at falde.
På mange steder når sættet af DC-link kondensatorer end-of-life hurtigere end IGBT'erne, ikke fordi designet er dårligt, men fordi varme og ripple-strøm stress akkumuleres stille og roligt over tid. Dette er grunden til, at luftflowstyring, nedrating i høje omgivelsestemperaturer og moderate bærerfrekvensvalg ofte betaler sig med færre uforklarlige udfald og færre midtlivsdrev genopbygninger.
Inverterbroen syntetiserer en kontrolleret trefaseudgang fra DC-bussen, ofte ved hjælp af IGBT'er drevet med PWM. Anti-parallelle dioder over IGBT'erne giver en strømvej under switch-overgange og understøtter strømkontinuitet, når motorinduktansen "insisterer" på at holde strømflydende.
PWM muliggør tæt kontrol, men det producerer også hurtige spændingskanter (høj dV/dt). At hæve switching (bærer) frekvensen reducerer ofte hørbar støj og strøm ripple, mens det øger switching tab og intern opvarmning. I praksis involverer indstillinger kompromiser, som operatører kan føle med det samme, stilhed på motorsiden versus temperaturmargin inde i driveren.
Almindelige driftskompromiser:
• Lavere bærerfrekvens: køligere driver, mere motorakustisk støj og moment ripple
• Højere bærerfrekvens: mere stille motor, varmere driver, mere stress på komponenter over tid
Kabellængde og motorens alder kan presse udgangskrav i en retning, der overrasker folk, der kun ser på navneskiltseffekt. Lange føringer og ældre isolationssystemer kan have gavn af yderligere foranstaltninger.
Almindelige output-side tilføjelser og praksis:
• dV/dt filtre eller sinusfiltre
• Korrekt jordforbindelse og skærmede kabler for at reducere lejrstrømme og EMI problemer
Når en motor decelererer eller belastningen driver motoren (en overhalingsbetingelse), kan maskinen generere strøm tilbage ind i DC-bussen. Bussens spænding stiger, og driveren skal lede eller afgive den energi for at undgå en DC-overbelastning. Dette er en af de adfærd, der kan virke tilfældig, indtil energistrømmen ses klart: inerti og hastighedsprofilvalg dominerer ofte resultatet.
Almindelige metoder til at håndtere regenerativ energi:
• Dynamisk bremsning (bremse chopper + modstand): konverterer regenerativ energi til varme; bredt anvendt, fordi adfærden er forudsigelig, og hardwaren er ligetil
• Regenerativ front-end (AFE eller separat regenereringsenhed): returnerer energi til nettet; ofte valgt når bremsning er hyppig eller når energigenvinding er i overensstemmelse med driftsmål
• Længere decel ramps: reducerer peak regenerativ effekt; nogle gange nok til at undgå at tilføje bremsningshardware
I fejlfinding stopper DC-overbelastning ofte efter, at deceltiden er afslappet, eller når bremseudstyret er dimensioneret til at matche den faktiske inertie. Hvad der tendens til at blive overset, er, hvor aggressivt hastighedsprofilen er konfigureret i forhold til den mekaniske energi, der er lagret i lasten.
VFD-kontrol spænder fra simple skalære til hurtige strømregulerede metoder. "Følelsen" af maskinen, især ved lave hastigheder eller under belastningsændringer, afhænger i høj grad af, hvilken kontrolfamilie der anvendes, og hvor godt motorens model matcher virkeligheden.
V/Hz opretholder en omtrent konstant spændings-til-frekvens-forhold. Det er ofte en komfortabel løsning til blæsere og pumper, hvor drejningsmomentbehovet er rimeligt forudsigeligt, og dynamikken er beskeden. Hvor det tendens til at vise sine grænser, er i lavhastigheds drejningsmomentstivhed og respons under pludselige belastningsændringer, hvor systemet kan føles lidt uklart eller forsinket.
Vektorkontrol (FOC) og DTC bruger strøm/spændingsføling og hurtig beregning (CPU/DSP) til at regulere flux-producerende og drejningsmoment-producerende strømkomponenter. Resultatet er et mere selvsikkert drejningsmomentrespons, især tæt på nul hastighed og under hurtige transienser, og hastighedsreguleringen forbedres yderligere, når encoderfeedback bruges.
Almindelige præstationsresultater forbundet med disse metoder:
• Stærkere lavhastighedsdrejningsmomentadfærd
• Hurtigere reaktion på belastningsændringer
• Tætsere hastighedsregulering, især med encoderfeedback
I mange installationer hjælper auto-tune-processen med at forbedre ydeevnen ved at matche kontrolmodellen til de faktiske elektriske egenskaber ved motoren i stedet for at stole på standardparameter værdier. Dette resulterer ofte i en mere præcis og stabil motorstyring.
En VFD ændrer mere end RPM. Det påvirker motorens termiske adfærd, mekaniske belastningsmønstre og overordnede strømkvalitet, og disse bivirkninger har tendens til at dukke op, efterhånden som nyheden om variabel hastighed aftager.
Almindeligt overset systemniveau påvirkninger:
• Motor køling ved lav hastighed: akselblæsere bevæger mindre luft; konstant-drejningsmoment lavhastighedsarbejde kan kræve en separat strømforsynet blæser eller en inverter-dimensionsmotor
• Mekaniske stressmønstre: glattere acceleration kan reducere stødbelastning, mens aggressive drejningsmomentgrænser kan bidrage til bælteslips, koblingsstress eller resonans
• Strøm kvalitet: diodens frontender introducerer harmoniske; flere drev på en delt kilde kan have brug for koordineret afbødning
• Beskyttelse og sikkerhed: integreret fejldetektion (overstrøm, over-/under-spænding, overtemperatur, jordfejl) og funktioner som Safe Torque Off (STO) ændrer, hvordan systemer er kablet, valideret og vedligeholdt
Stabile resultater opnås sjældent ved at lade alt være på standard og håbe, at processen er blid. Forudsigelighed kommer normalt fra en kort, metodisk opsætningsrytmik, mindre dramatisk end heroisk fejlfinding, men langt mere tilfredsstillende, når maskinen kører rent skift efter skift.
En opsætningscheckliste, der ofte betaler sig under idriftsættelse:
• Indtast nøjagtige motorens navneskiltdata (spænding, strøm, frekvens, hastighed og effektfaktor, hvis drevet anmoder om det)
• Vælg en kontroltilstand, der matcher belastningsprofilen (blæser/pumpe, konstant-drejningsmoment eller høj-dynamik)
• Indstil acceleration/deceleration baseret på inertie og bremseevne i stedet for personlig præference
• Vælg en bærerfrekvens, der afspejler både støjforventninger og termisk hovedrum
• Bekræft jording, kabeltype og kabel længdepraksis, før du forfølger intermittent eller "spøgelse" fejl
En produktiv mental model er at behandle VFD som et energi-routing system med tre distinkte opgaver: forme inputstrøm ved linjesiden, buffere energi i DC-linket og regulere motorkraft på udgangssiden. Når den strøm holdes i fokus, bliver tilbagevendende problemer, DC-overbelastning, svagt lavhastighedsdrejningsmoment, irritationfejl og tidlig komponentaldring lettere at forklare, teste og rette.
Klassificering af VFD'er
Efter Power-Stage Arkitektur
VSI-drev anvendes bredt i industrielle systemer, fordi topologien er simpel og praktisk. Drevet konverterer AC-input til en DC-bus gennem en diodebro eller aktiv front-end, og bruger derefter en inverter til at generere variabel-frekvens og variabel-spændings strøm til motoren. Store DC-buskondensatorer hjælper med at opretholde en stabil spændingsforsyning og reducere spændingsvariation forårsaget af belastningsændringer.
I dag-til-dag opstart arbejde er denne arkitektur ofte tilgivende over for almindelige variabel-drejningsmoment belastninger såsom pumper og blæsere, hvilket er grunden til, at det ofte efterlader et godt første indtryk i marken.
Samtidig kan kombinationen af en stiv bus og hurtige skiftkanter hæve dv/dt ved motorernes terminaler, og denne virkelighed bliver svær at ignorere, når motorledninger bliver lange, eller når ældre isolationssystemer allerede lever på lånt tid.
Almindelige commissioning-detaljer, der regelmæssigt afgør, om en VSI-installation føles ren eller rodede:
• Motorlednings længde og rute
• Jordingsmetode og bindingens kvalitet
• dv/dt eller sinusfiltreringsstrategi
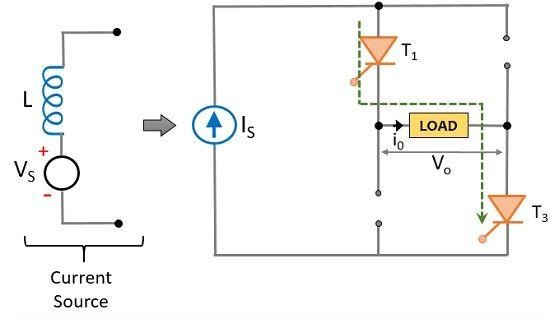
CSI-drev har en anden holdning: en stor induktor i DC-linket skubber systemet mod relativt konstant DC-strøm, og udgangsstadiet former motorstrømmen derefter. De specificeres sjældnere i dag, men de dukker stadig op i høj effekt, mellemspænding og belastninger, hvor kontrolleret strømadfærd passer til risikoprofilen og driftskulturen i anlægget.
I praksis har CSI en tendens til at bytte bekvemmelighed for forudsigelighed. Hardwarefodaftrykket er større, konfigurationsrummet kan føles smallere, og økosystemet af let tilgængelige dele og teknikere er mindre end hvad de fleste teams forventer med VSI. Alligevel kan den mere stabile strømadfærd føles betryggende for applikationer, der stemmer overens med CSI's styrker, især når stedet værdsætter konservativ elektrisk stress og holdbar drift mere end kompakthed.
Typiske CSI-afvejninger, der former virkelige projekter:
• Større fysisk størrelse og højere systemkompleksitet
• Færre almindelige servicemuligheder og reservedele
• Stærk tilpasning til bestemte MV- og tungduty-brugssager
Diskussioner om drev fokuserer ofte på inverteren, men frontenden er ofte det, der afgør, hvordan systemet opfører sig på anlæggets bus og under bremsning. En diodfrontende er simpel og budgetvenlig, men den trækker ikke-sinusoidal inputstrøm og kan typisk ikke skubbe energi tilbage til nettet. En AFE kan forbedre input effektfaktor, reducere harmoniske og støtte regeneration.
Denne bestemmelse bliver smertefuld åbenbar i processer med hyppig deceleration eller overhaling belastninger. Når en maskine gentagne gange løber ind i DC-bus overbelastning under hurtige stop, er det fristende at bebrejde tuning, men den ubehagelige sandhed er ofte en energi-håndteringsmisforhold: energien kommer tilbage hurtigere end systemet kan absorbere eller returnere det.
Front-end og energi-håndteringsmuligheder, der ofte vælges i marken:
• Diodfrontende
• Aktiv Front End
• Bremsermodstand / dynamisk bremse-chopper
• Regenerativ enhed eller delte DC-bus-løsninger
• Længere decel-ramp, der er tilpasset proces-tolerance
Klassifikation efter Switching- og Modulationsmetode
Ældre drev er nogle gange afhængige af PAM eller tidligere modulationsstrategier forbundet med ældre strømforsyningsenheder og kontrolhardware. Disse systemer vises stadig i langvarigt udstyr, og de kan køre pålideligt, lige indtil livscyklus support begynder at føles som gætterier. Sammenlignet med moderne PWM-tilgange falder de normalt bagud i effektivitet, akustisk adfærd og kontrolmuligheder.
Fra et vedligeholdelsesperspektiv er det følelsesmæssige "trykpunkt" sjældent ydeevne, det er usikkerhed. Når udskiftningskomponenter bliver sjældne, og dokumentationen er tynd, har moderniseringsplanlægning en tendens til at fokusere på at migrere til moderne PWM-drev, mens man forbliver respektfuld over for eksisterende motorer, kabler og procesbegrænsninger.
PWM er den moderne standard, fordi den tilbyder fleksibel kontrol over spænding og frekvens og understøtter de kontrolmuligheder, som de fleste team forventer i dag. Space-vector PWM er bredt brugt, fordi det forbedrer DC-bus udnyttelse og kan reducere harmonisk forvrængning i motorstrøm.
En operationel detalje, som erfarne teknikere lærer at behandle med ydmyghed, er, at PWM-bølgeformens kvalitet altid kommer med en pris. Renere strøm kræver typisk mere switching aktivitet, og det hæver switching tab og termisk belastning. De bedste resultater kommer normalt fra at balancere bærerfrekvens, termisk rum og audible støjmål snarere end at jage en enkelt bedste knapindstilling.
Almindelige PWM konfigurationsværktøjer, der rutinemæssigt handles mod hinanden:
• Bærerfrekvens
• Termisk margen og varmeafleder/blæserkapabiliteter
• Forventninger til audible støj
• Motorstrøm ripple og moment ripple tolerance
Øgning af bærerfrekvens reducerer ofte strøm ripple og kan flytte switching støj over det mest følsomme auditive område. I besatte rum kan den ændring føles som en lettelse, og i visse maskiner forbedrer det direkte den opfattede produktkvalitet.
Begrænsningen er varmehåndtering. Højere switchingfrekvenser øger inverter-tab, og det kan presse drevet mod nedre rating, stærkere kabinetluftstrøm eller en større rammestrørrelse. Mange felterklæringer, der dukker op som "mystisk overophedning", bliver meget mindre mystiske, når bærerfrekvens, omgivelsestemperatur, kabinetbegrænsning og duty cycle vurderes sammen.
Varmerelaterede løsninger, der ofte anvendes til at stabilisere høj-bærer-opstillinger:
• Reducer bærerfrekvens til et realistisk niveau for duty cyklen
• Nedgrader outputstrøm og revidere overbelastningsforventninger
• Forbedre indkapslingens ventilation eller varmeafledningsvej
• Flyt op til en større drevrammestørrelse
Mellemlavspændings VFD'er bruger ofte multilevel inverter topologier til at reducere spændingstrin og forbedre bølgeformkvalitet. Bredbåndsgab-enheder som SiC og GaN kan skifte hurtigere og mere effektivt, hvilket kan føles som en teknisk sejr, indtil hurtige kanter øger dv/dt stress og elektromagnetisk interferens i layout, der ikke er udført med disciplin.
En pragmatisk måde at tænke på det er, at hurtigere skift kan forbedre kontrolmulighederne, mens installationsdetaljer samtidig bliver mere synlige. Når motorlejer viser tidlig slitage, eller når sensorer begynder at opføre sig støjende, er årsagen ofte fællesmode spænding og lednings-/jordpraksis snarere end nogen mangel i kontrolalgoritmen.
Installations- og afhjælpningselementer, der ofte bestemmer resultaterne med hurtige kanter:
• Valg af motorkabel og afskærmningsmetode
• Jordings- og bindings-topologi
• Udgang dv/dt filtre eller sinusfiltre
• Mitigering af lejers strøm
• EMI-bevidst layout og adskillelse af signal/strøm ledninger
Klassifikation efter kontrolfilosofi
V/Hz kontrol opretholder et spænding-til-frekvens forhold, der holder motorflux i et brugbart område. Det er enkelt, stabilt i mange installationer, og bredt anvendt på variable momentbelastninger som blæsere og centrifugalpumper.
Denne tilgang skinner ofte, når processen ikke kræver stram momentkontrol ved meget lav hastighed. I marken lykkes det ofte, fordi det reducerer indstillingstid og sænker chancen for oscillationer forårsaget af forkerte motorparametre. Afvejningen er beskeden dynamisk respons, især under hurtige belastningsændringer, hvor processen beder, og drevet reagerer et takts senere.
Vektor kontrol adskiller momentproducerende og fluxproducerende komponenter ved at estimere eller måle motorstatus. Sensorløs vektor kontrol kan præstere imponerende uden en encoder, men det er stærkt afhængigt af nøjagtige motordata og rimeligt stabile driftsforhold. Lukket sløjfe vektor kontrol tilføjer en encoder eller resolver, hvilket typisk forbedrer lav-hastigheds momentadfærd, nøjagtighed og transiente respons.
I praksis kan mange vektor kontrolproblemer spores tilbage til parametre snarere end teori. Navneskiltoplysninger er ofte et udgangspunkt, ikke en mållinje. En kort identifikationskørsel, fornuftige basisfrekvensvalg og realistiske strømgrænser omdanner ofte et drev, der føles blødt, til et, der holder hastighed og moment på en måde, som operatørerne kan stole på.
Vektor-kontrolleringsopstillingspunkter, der ofte bestemmer ydeevnen:
• Bekræftede motor navnplade data
• Motor-ID / autotune-resultater og deres plausibilitet
• Basisfrekvensvalg, der er i overensstemmelse med motorens design
• Strømgrænser og momentgrænser tilpasset mekanikken
DTC regulerer moment og flux mere direkte, hvilket muliggør meget hurtig momentrespons i applikationer med skarpe transienter og krævende momentadfærd.
Beslutningspunktet er sjældent kun hastighedsrespons; det er, hvordan det mekaniske system tåler den respons. Et drev, der kan ændre moment næsten øjeblikkeligt, kan også excitere resonanser, hvis ramper og grænser er sat aggressivt. De mest robuste opsætninger behandler motoren, koblingen, gearkassen og belastningen som et sammenkoblet system, og former derefter accelerationsprofiler og momentgrænser for at matche, hvad mekanikken kan absorbere uden protest.
Applikationsdrevne kategorier
Generelle drev lægger vægt på bred kompatibilitet og omkostningsbevidste funktionssæt. Højtydende drev tilbyder typisk strammere strømkontrol, rigere feedback- og I/O-muligheder, højere overbelastningskapacitet og mere avanceret diagnose.
En indsigt i valg, der gentagne gange viser sig i reelle projekter, er, at højtydende funktioner betaler sig mest, når processen kræver gentagelighed under forstyrrelser, ikke blot når motorens vurdering er stor. Mange store blæsesystemer kører glat på generelle V/Hz, mens mindre systemer til spændingskontrol, indeksering eller stram hastighedsregulering ofte drager fordel af vektor kontrol og feedbackkapacitet.
Typiske separatorer mellem drevklasser i indkøbsdiskussioner:
• Overbelastningskapacitet og termisk modelkompleksitet
• Feedback enhed understøttelse (encoder/resolver)
• Diagnostisk dybde og spor/overvågningsværktøjer
• I/O fleksibilitet og integrationsfunktioner
Spindel applikationer kræver høj elektrisk frekvenskapacitet, stabil hastighedsregulering og omhyggelig håndtering af motoropvarmning ved forhøjede omdrejninger. Disse drev lægger ofte vægt på hurtig skiftpræstation og specialiserede motorbeskyttelsesfunktioner skræddersyet til spindler.
I praksis går valg af drev typisk glattere, når det respekterer spindelmotors isoleringssystem og leje strategi frem for at fokusere snævert på topfart. Når spidser fejler tidligt, er roden til problemet ofte termisk styring, smøring eller elektriske leje strømme, problemer der kan være frustrerende, netop fordi de maskererer sig som kontrolproblemer.
Spindel-relaterede ingeniørkontroller, der ofte forhindrer ubehagelige overraskelser:
• Motorisolations egnethed til hurtige kanter og høj frekvens
• Afbødning af leje-strøm tilgang
• Termiske grænser på tværs af det tiltænkte hastighedsområde
• Køle- og smøringsantagelser under reelle driftcykler
Enfase indgangsdrev er almindelige i let industri og kommercielle miljøer, men de bliver ofte nedgraderet, fordi indgangsstrømmen stiger for den samme udgangseffekt. Trefase indgang distribuerer typisk indgangsstrømmen mere jævnt og skalerer mere komfortabelt, når effekten stiger.
En praktisk installationsdetalje er kapacitetsplanlægning opstrøms. Ubehagelige afbrydelser og overophedede ledninger kan ofte spores til undervurdering af enfase indgangsstrøm, overset tilskudsbeteende, eller ignorering af hvordan harmoniske interagerer med beskyttelsesenheder.
Opstrøms overvejelser der ofte driver installationsresultater:
• Afbryder/sikring størrelse og udløsningskurve valg
• Lederstørrelse og temperaturstigning i rør/bakke
• Tilskud og forladningsadfærd
• Harmonisk indvirkning på beskyttelse og opstrømsudstyr
Funktionel Terminologi
For de fleste AC-motorer kommer anvendelig moment over et hastighedsområde fra at koordinere spænding med frekvens. Den koordinering sidder i centrum af hvad en VFD gør, selv når kontrolmetoden er sofistikeret. Den underliggende begrænsning forbliver den samme: motorflux skal forblive inden for rimelige grænser for at undgå svag moment på den ene side og overophedning på den anden.
En jordet måde at fortolke “VVVF” på er som en påmindelse om motorfysik snarere end et brandnavn. Når man fejlfinder svag moment eller uventet opvarmning, kommer klarhed ofte hurtigt fra at tjekke om den beordrede spænding, den beordrede frekvens og strømmens grænser faktisk matcher motorens driftspunkt og belastningskrav.
CVCF beskriver regulerede strømkilder designet til at holde spænding og frekvens stabil, hvilket er åndeligt ligner levering fra forsyningsvirksomheder. Den model er ikke rettet mod at ændre motorhastighed.
Når målet er hastighedskontrol, har CVCF tendens til at sende tankegangen i den forkerte retning. Hastighedskontrol afhænger af variabel frekvens, og stabil momentadfærd følger sædvanligvis, når spændingen styres i takt med frekvensen under motorens og applikationens begrænsninger.
Kontrolfunktioner for lavspændings VFD'er

Hvorfor kontrolmode stadig former resultater i den virkelige verden i moderne lavspændingsdrev
Moderne lavspændings, generelle VFD'er (typisk 380–690 VAC klasse, cirka 0,75–400 kW, med 0–400 Hz output) ligner ofte hinanden fra et hardware-synspunkt, hvilket kan få teams til at forvente lignende adfærd på maskinen. I feltet viser forskellen sig hurtigt: kontrolmetoden dikterer i høj grad, hvordan drevet føles, når processen bliver rodet, kolde startere, belastningsspring, lange kabler, marginale motorer og operatører, der ikke overvåger tuning.
Hvad kontrolstrategien ender med at påvirke, er ikke abstrakt; det bliver et sæt af hverdagstræk, som vedligeholdelse og produktion bemærker.
Lavhastighedsmomentkapacitet; hastighedsholdningsnøjagtighed; transientrespons på belastningsspring; akustisk støj; harmonisk forvrængning; motoropvarmning/termisk stress; følsomhed over for parameterdrift; følsomhed over for idriftsættelseskvalitet.
I praksis er den bedste driftsmode normalt den, der opfylder moment- og responskravene, mens den forbliver stabil på tværs af temperaturændringer, belastningsvariation og ikke-ideelle driftsforhold. Modusser, der kun præsterer godt under demonstrationer, kan senere skabe problemer, hvis konstant genjustering, støjklager eller ustabil adfærd opstår efter motorudskiftning eller systemændringer.
Generation 1: SPWM med Fast V/Hz (Skalar Kontrol)
Skalar kontrol holder et omtrent konstant V/Hz-forhold, så motorens luftspalte flux forbliver tæt på et ønsket niveau, når frekvensen ændres. Med sinusoidal PWM (SPWM) er implementeringen ligetil, omkostningsprofilen er venlig, og adfærden er normalt stabil, når belastningen er glat, og det anvendelige hastighedsområde ikke er ekstremt.
Ved lav frekvens er den kommanderede stator spænding i sig selv lille. Det gør stator modstands fald (I·Rs) uforholdsmæssigt stort i forhold til den påførte spænding, så fluxen falder under det tilsigtede niveau. Resultatet er ikke subtilt: drejningsmoment kapacitet falder, motoren kan stoppe under belastning, og nogle maskiner udvikler en ubehagelig "overbelastning" eller oscillation, som operatørerne tolker som mekanisk problem.
To yderligere effekter forstærker ofte frustrationen nær nul hastighed: inverter dødtid og halvleder spændingsfald. Disse tab reducerer yderligere den effektive spænding ved motorterminalerne, hvilket er en grund til, at to drivere med samme kW navneskilt kan opføre sig mærkbart anderledes under kravl og positionering.
Installationer, der holder sig til skalær kontrol, men stadig ønsker tålelig lavhastigheds adfærd, stakker typisk flere pragmatiske justeringer. Hver enkelt kan hjælpe, og hver enkelt kan også skabe en ny fejlsituation, hvis den presses for hårdt.
• Spændingsforstærkning / IR kompensation: tilføjer ekstra lavfrekvent spænding for at kompensere for I·Rs; forbedrer startmoment, men aggressive indstillinger kan overfluxe motoren og øge opvarmning.
• Glid kompensation: tilføjer frekvens som en funktion af belastningsstrømmen for at reducere induktionsmotorens hastigheds fald; kan stramme transportbånd og miksere, men det kan provokere jagt når mekanikken er elastisk eller strømfeedback er støjende.
• Flere punkt V/f kurver: bruger stykkevis V/f formning i stedet for en enkelt lige linje; kan få et problematisk hastighedsbånd til at fungere, mens det gør lidt andetsteds.
• +Ramp formning og strømgrænser: justerer acceleration/nedbremsning og begrænsende adfærd; forhindrer ofte generende udløbs på høj inerti belastninger mere pålideligt end en enkelt "magisk" kompensationsknap.
Når applikationen ønsker stærkt moment ved meget lav hastighed, hyppige omvendinger eller præcise moment begrænsninger, har skalær kontrol det med at blive en cyklus af små forbedringer, der aldrig helt føles afsluttede. Maskinen kan køre acceptabelt efter opvarmning og stabil belastning, så miste kontrol efter temperaturændringer, motorbytte eller ændringer i kabellængde, præcis den slags variabilitet, der får teknikere til at mistro opsætningen, selvom den ser fint ud på papiret.
Generation 2: SVPWM med forbedret skalær kontrol
Rumvektor PWM (SVPWM) bruger inverter skiftevektorer mere effektivt end traditionel SPWM. Det praktiske resultat er højere DC-bus udnyttelse og lavere harmonisk forvrængning for det samme hardware, hvilket typisk oversættes til mere brugbar grundspænding, glattere strøm, og ofte mindre motor støj og opvarmning.
Når SVPWM kombineres med strømfeedback plus lavhastigheds spænding/flux kompensation, føles mange skalær drev mindre "bløde" ved lav hastighed og holder hastigheden mere overbevisende under moderate belastningsændringer. For hold, der ønsker bedre adfærd uden at ændre indkøringskultur, kan den inkrementelle forbedring være virkelig tiltalende.
Selv med SVPWM, adskiller skalær kontrol ikke sandfærdigt flux og moment. Moment responsen formidles stadig gennem det indirekte forhold mellem spænding, flux og glid. Under dynamiske krav reagerer drevet ofte efter motorens tilstand allerede er ændret, hvilket har tendens til at føles langsommere end metoder, der regulerer moment direkte. Dette er grunden til, at SVPWM-forbedret skalær kontrol ofte opfattes som en forfining snarere end et skridtændring for højtydende bevægelse.
SVPWM kan producere målbare gevinster, selvom ændringerne ikke ændrer noget andet, men de større forbedringer viser sig normalt først efter at have genbesøgt opsætningsgrundlagene, som folk forståeligt skynder sig gennem under en opstart.
Indstillinger, der ofte afgør, om SVPWM vises i produktion:
• Basis frekvens
• Motor navneskilt data
• Minimum frekvens
• Spænding/IR kompensation
• Strømgrænser.
Mange klager, der er mærket "lav hastigheds ustabilitet", tilbagefører til konservative strømgrænser eller forkerte motorparametre i stedet for selve PWM-metoden, hvilket kan være en ydmygende opdagelse under fejlfinding.
Generation 3: Vektor kontrol
Hvad FOC tilføjer: Separate håndtag for moment og flux
Vektor kontrol konverterer målte fase strømme til en roterende reference ramme, så flux-producerende strøm og moment-producerende strøm kan reguleres uafhængigt, på en måde der ligner DC motor controllability. På dette stadium ændrer motor kontrol sig fra simpel justeringsadfærd til direkte og præcis drev kontrol. Gevinsten er stærkere lavhastigheds moment og hurtigere respons, fordi momentet bliver en direkte styret variabel snarere end en bivirkning af glid.
Sensorløs vs. Lukket-løkke Vektor: En forskel, du føler på maskinen
• Sensorløs vektorstyring: estimerer rotorposition/flux ved hjælp af spænding, strøm og en motormodel; reducerer kabelføring og omkostninger; anvendes bredt i den generelle industri; har tendens til at kæmpe ved nul hastighed, fordi tilbage-EMF er lille, og modelfejl bliver uforholdsmæssigt indflydelsesrige.
• Lukket løkke vektorstyring: bruger en encoder eller resolver; leverer konsekvent nul-hastigheds moment og gentagelig dynamik; vælges ofte til hejseværk, vindere, elevatorer og præcisionsbevægelse; kan gøre idriftsættelse mindre nervepirrende, når mekanikken er følsom over for momentbølge.
Parameterfølsomhed: Handelsaftalen, du lever med efter opstart
Vektorens ydeevne afhænger i høj grad af motorns parametre og fluxestimering. Adskillige effekter kan stille og roligt ændre disse parametre under normal drift, og drevets sikkerhed vil kun være så høj som dets model.
Kilder til afdrift og misforhold, der ofte dukker op i produktionen.
• Rotor tidskonstant afdrift
• Temperaturdrevne stator modstand ændringer
• Magnetisk mætning ved højere belastning
• Lang motor kabel impedans og EMI-effekter
Et almindeligt symptommønster optræder, når systemet fungerer glat, mens det er koldt og let belastet, men senere bliver mindre stabilt, mere støjende eller inkonsekvent under høj temperatur eller tung belastning. Disse situationer fører ofte til enten mistillid til vektorstyring eller til strengere justerings- og parameteridentifikationsmetoder.
Justeringspraksis, der ofte giver roligere installationer
Stabile vektorinstallationer deler ofte et par vaner, der ikke lyder glamorøse, men forhindrer lange fejlfinding sessioner senere.
• Valider motor data under reelle kabelforhold: kabel længde, udgangsreaktorer, jordforbindelse og installationslayout påvirker estimering og EMI på måder, som bænksæt sjældent fanger.
• Brug roterende autotune, når det er tilladt: statisk tuning kan være fint til blæsere og pumper, men højmoment lavhastighedsarbejde drager ofte fordel af roterende identifikation.
• Matcher kontrolbåndbredde til mekanikken: alt for aggressive momentløkker kan excitere koblinger, backlash og resonanser; lidt langsommere, men godt dæmpet adfærd giver ofte bedre throughput og færre unødvendige udfald.
En praktisk regel for at vælge tilstand uden at overanalysere det
Hvis processen er følsom over for lav-hastigheds moment eller forventer hurtig genopretning fra belastningstrin, reducerer vektorstyring ofte antallet af ubehagelige overraskelser senere, selvom opsætningsindsatsen stiger. Hvis processen tolererer hastighedsdråbe og sjældent fungerer tæt på nul hastighed, giver skalartilstande ofte mere jævn dag-til-dag opførsel med færre knapper, der kan være fejlindstillet.
Generation 4: DTC (Direkte Moment Styring)
Direkte momentstyring estimerer statorflux og moment i stator reference ramme og vælger inverterens omskiftningstilstande for at holde flux og moment inden for hysteresebånd. Fordi det undgår nogle af den indtrappede loopstruktur, der typisk findes i FOC-implementeringer, kan det levere meget hurtig momentrespons og stærk forstyrrelsesafvisning. I applikationer, hvor operatører bemærker hvert momentfald som et produkt defekt eller en procesforstyrrelse, kan denne reaktionsdygtighed være mere beroligende end en smukt glat bølgetype.
Fordele, der ofte observeres.
• Hurtig momentrespons ved pludselige belastningsændringer
• Stark lavhastighedsmoment, når estimering forbliver pålidelig
• En relativt direkte struktur, der kan opføre sig robust ved højere effekt niveauer.
Omkostninger og begrænsninger, der kræver planlægning.
• Momentbølge og variabel omskiftning frekvens
• Hystereseadfærd kan skabe hørbar støj og momentpulsering, der skiller sig ud i lav-inertiale eller præcisionssystemer.
EMI og termisk design kompleksitet: variabel omskiftning komplicerer filterdesign og kan forværre motorakustik, hvis det ikke håndteres.
Afhængighed af estimationskvalitet: svagheder ved nær nul hastigheds observatører kan optræde, svarende til sensorløs vektor, selvom implementeringer varierer bredt mellem leverandører.
DTC skinner ofte, når momenttransienter betyder mere end ultra-glat moment, og hvor drev/motor-parring er dimensioneret og integreret med den forventning. I tung industri er appellen ofte mindre om top-specifikationer og mere om at komme sig over forstyrrelser på en måde, der forbliver konsistent uden skrøbelig tuning.
Generation 5: Matrix AC–AC Konvertering
En matrixomformer konverterer AC-input direkte til AC-output uden en stor DC-link kondensator bank. Det forskyder systemets personlighed: det kan forbedre input effektfaktor, reducere store energilagringskomponenter og tillade iboende bidirektionel energiflow. Samtidig ændrer det modulationsbegrænsninger, beskyttelsesmetoder og commutations krav, hvilket har tendens til at øge koordinationsbyrden mellem kontrol- og elhardware.
Matrixomformning kræver omhyggeligt timet kommutation for at undgå kortslutning af indgangsfaser eller afbrydelse af induktive strømveje. At opnå stabil sensorløs adfærd og stærk lavhastigheds moment kræver typisk høj-præcisions observatører (flux, moment, nogle gange hastighed), hurtig realtidsberegning og sofistikeret moduleringsmetode, der kan blande PWM med hysterese-lignende beslutningslogik. Når det gøres godt, kan momentresponsen nå millisekundskala adfærd, men ingeniørkomfortmargenen er ofte smallere end med konventionelle spændingskildes invertere (VSI), hvilket kan gøre teams forsigtige, medmindre fordelene tydeligt opvejer den ekstra kompleksitet.
• Spændingsoverførselsforholdets begrænsninger: praktisk maksimal udgangsspænding er begrænset i forhold til indgang, hvilket kan mindske momentmarginen ved høj hastighed, medmindre systemet er designet omkring det.
• EMC og filtrering: fjernelse af DC-linket flytter filtreringsbyrden og kan komplicere overholdelse i elektrisk støjende miljøer.
• Pålidelighedshandler: fjernelse af elektrolytiske kondensatorer kan forbedre levetiden i nogle driftsprofiler, men konverteren introducerer mere komplekse svitsje- og beskyttelseskrav, der flytter, hvor fejl kan opstå.
Matrixomformere retfærdiggøres typisk, når tovejs energi-strøm, kompakthed eller bekymringer vedrørende kondensatorlivslængde dominerer, og når stedet kan støtte den ingeniørmæssige og vedligeholdelsesmæssige sofistikation, der følger med. De er sværere at retfærdiggøre, når prioriteterne hælder mod hurtig implementering, bred servicekendthed eller høj tolerance over for parameterusikkerhed og "tilstrækkeligt gode" motordata.
Gennem disse generationer forbliver mønsteret konsistent: ydeevnen forbedres, når moment og flux bevæger sig fra fremkommende adfærd til eksplicit regulerede variable. Handel er, at hvert skridt opad ofte er mere afhængigt af modeller, målekvalitet, idriftssættelsesdisciplin og mekanisk kompatibilitet. En drive, der teoretisk set er stærkere, kan stadig underpræstere, når motordata er forkerte, når det mekaniske system forstærker ripple, eller når driften tilbringer tid tættere på en observatørs svage område.
Karakteristika af en VFD
VFD'er har tendens til at opnå deres omdømme i målte adfærd, ikke i brochure-sprog. Hvad der typisk afgør debatten, ofte efter et par lange opstartrunder foran et panel, er, hvor konsekvent drivlinjen ændrer motorresponsen under opstart, hastighedsændringer og del-belastningsdrift. Det er de øjeblikke, hvor ældre tilgange ofte bytter energi, glathed eller udstyrs liv.
I det daglige ingeniørarbejde er resultaterne mere gentagelige, når elektrisk ydeevne og procesforventninger håndteres som en enkelt designtråd (strømforsyningsgrænser, motor-termisk grænser og procesdynamik bundet sammen), snarere end som to parallelle tjeklister, der kun mødes ved idriftssættelse.
Blød Start og Lavere Elektrisk/Mekanisk Stress
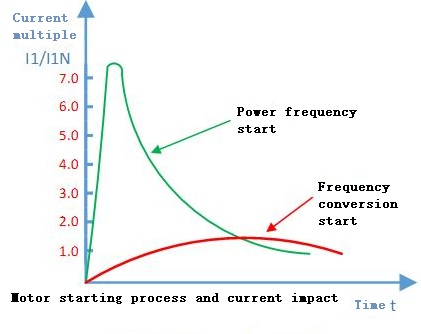
En definerende egenskab ved en VFD er kontrolleret acceleration, implementeret ved at koordinere spænding og frekvens under rampen. Med en direkte start er strømstødet typisk i området af ~5–7× nominelt strøm, og ulemperne viser sig hurtigt.
Typiske sideeffekter ved direkte start:
• Spændingsdyk
• Uønskede afbrydelser
• Kontaktor slid
• Kobling/bælte/gearkasse choc.
Med en VFD-ramp forbliver startstrøm ofte tættere på ~1.2–1.5× nominelt, selvom de faktiske tal stadig afhænger af belastningsprofil, accelerations tid og momentkrav. Når det strømskud undgås, mærker folk på gulvet det ofte, før nogen løber tallene: færre forskrækkede blikke mod afbryderstatus, færre mid-shift genstarter, og et roligere kontrolskab under mandag-morgen opstarter.
Opstrømsudstyr drager også fordel af den blødere elektriske profil. Lavere indgangsstrøm reducerer topstress på transformatorer, generatorer og delte feederne, og det mindsker chancen for, at andre følsomme belastninger på samme bus oplever en kort undervoltage. I feltfejlretning er dette en af de ændringer, der stille reducerer frustration: "tilfældige" afbrydelser stopper med at være tilfældige, og vedligeholdelse stopper med at forfølge intermitterende symptomer, der var rodfæstet i hårde starter.
Fordi moment kan styres, mens hastigheden stiger, kan drivlinjen undgå det pludselige momentspid, som direkte start ofte producerer. Det viser sig som en mere forudsigelig mekanisk adfærd, især på maskiner, der allerede har lært teamet lidt ydmyghed.
Almindelige mekaniske resultater, når momentrampen er veludformet: længere bæltelevetid; færre koblingsfejl; reducerede torsional oscillationer i roterende tog.
I mange anlæg er den praktiske adskillelse ikke, om belastningen starter én gang, men om den starter på samme måde hver gang. Belastninger med høj startfriktion, klistret produkt eller kolde lejer reagerer ofte bedre, når rampen justeres med intention snarere end gættet. Stabil og forudsigelig opstartadfærd forbedrer tilliden under normal drift.
En accelerationsramp, der er for aggressiv, kan stadig skabe strømspidser og mekanisk chok. En alt for langsom ramp kan presse motoren mod overophedning ved lav hastighed, når ventilationskøling er svag, eller når drejningsmomentbehovet forbliver forhøjet.
En idriftsættelsesmetode, der ofte føles mere stabil (og senere er nemmere at forsvare), er at begynde med konservativ acceleration og derefter forkorte den kun, når processen virkelig drager fordel, samtidig med at man holder øje med et lille sæt signaler, der sjældent lyver:
Signaler at følge under rampjustering:
• Drevet udgangsstrøm
• Motortemperatur (eller termisk model)
• Vibration ændringer
• Gentagen start konsistens
Bredt spænd, glat hastighedskontrol gennem frekvensvariation
En anden definerende egenskab er hastighedskontrol uden mekanisk omarbejdning. I stedet for at ændre polpar eller tilføje geartrinværdier, varierer VFD forsyningsfrekvensen. For en induktionsmotor udtrykkes synkrone hastighed og rotorrate typisk som:
n₀ = 60f / P
n = 60f(1 − S) / P
Hvor f er frekvens, P er antallet af poler, og S er glide. At variere f muliggør glatte hastighedsovergang, mens glide holdes inden for et område, som controlleren kan styre. I praksis oversættes det til mere stabil procesadfærd: transportbånd kan matche opstrøms/nedstrøms hastigheder, pumper kan følge efterspørgslen, og blæsere kan holde trykindstillinger uden den stop-start cykling, der slider på både hardware og tålmodighed.
Et punkt, der nogle gange overses, indtil skrot eller omarbejdning gør det smertefuldt åbenlyst, er, at glat hastighedskontrol ikke kun handler om bekvemmelighed. Reduceret procesvariabilitet sænker ofte operatørinterventioner, og det kan skære ned på kvalitets tab, der aldrig vises på energimåleren.
VFD-kontrol betaler sig mest klart, når processen bruger virkelig tid væk fra norn hastighed. I stedet for at køre med fuld hastighed og kassere overskuddet gennem throttling eller dæmpning, kan systemet operere tættere på, hvad belastningen faktisk kræver i det øjeblik. Det forbedrer generelt stabiliteten og reducerer slid på kontrolkomponenter, der ellers tilbringer deres liv med at kæmpe mod maskinen.
Komponenter, der ofte ser mindre slid, når hastighed bruges til kontrol:
• Throttling-ventiler
• Indløbsdæmpere
• Omkoblingsveje
• Mekaniske bremser brugt til pacing
Glide S er mere end en variabel i en ligning; det afspejler, hvordan motoren udvikler drejningsmoment under belastning. Drevet kontrol styrer glide indirekte ved at koordinere spænding og frekvens, så motoren kan producere drejningsmoment uden at trække overdreven strøm.
I idriftsættelse hjælper det at se på drejningsmomentbehovet på tværs af hele hastighedsområdet, ikke kun ved et behageligt midt-hastighedspunkt. Indstillinger, der føles fine ved midt-hastighed, kan blive skuffende nær lav-hastighed drejningsmomenttoppe, og den skuffelse har tendens til at dukke op på den mindst bekvemme tid, under kolde starter, tunge partier eller efter en procesfejl.
Højt energibesparende potentiale på variable-drejningsmoment belastninger
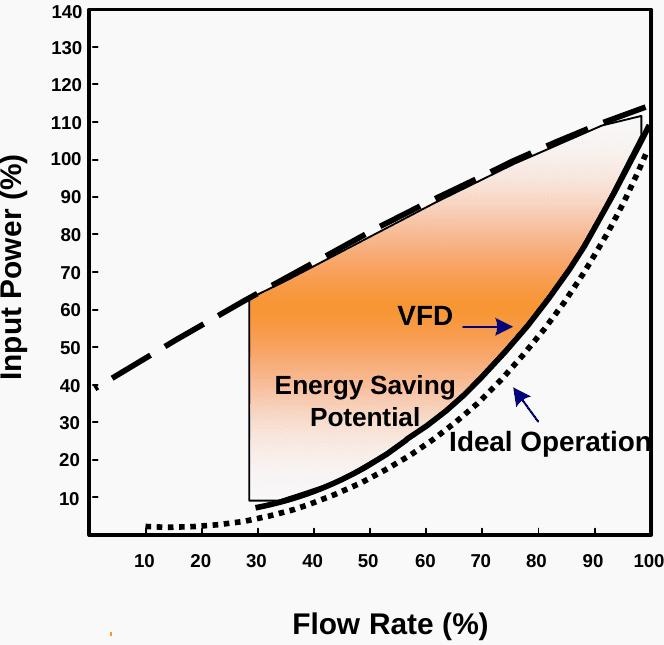
Energireduktion er ofte stærkest på variable-drejningsmoment belastninger såsom blæsere og centrifugalpumper. Affinitetslovene forklarer formen på besparelserne:
Affinitetsrelationer:
• Flow ∝ Hastighed
• Tryk/Højde ∝ Hastighed²
• Effekt ∝ Hastighed³
Fordi effekt skaleres med kuben af hastighed, kan selv moderate hastighedsreduktioner producere store effektbesparelser. Det er derfor throttling-ventiler og indløbsdæmpere ofte følger hastighedsreduktionen, når efterspørgslen varierer: throttling dissiperer energi som tryktab, mens hastighedskontrol reducerer den energi, systemet har brug for at generere i første omgang.
I driftsmiljøer er forskellen normalt synlig på mere end ét sted, hvilket er tilfredsstillende på en meget praktisk måde, fordi det bekræfter, at kontrolstrategien gør, hvad modellen forudsagde:
Almindelige drifts-tegn på reduceret efterspørgsel ved lavere hastighed:
• Lavere kW-forbrug
• Stille drift
• Mindre varme i systemet
• Færre serviceopkald til ventiler og dæmpere
Fra et professionelt synspunkt kommer de besparelser, der holder op over tid, ofte fra at behandle VFD'en som en del af kontrolstrategien (indstillinger, grænser og feedback), ikke som en manuel hastighedsknap, der driver med vaner og skift-til-skift præferencer. Når driften er integreret med klar logik, tryk-, flow- eller temperaturkontrol med sikkerhedsstænger, forbliver resultaterne normalt stabile, selv når operatørerne skifter.
Mange systemer kører med delvis belastning i størstedelen af deres driftstimer. En VFD tilpasser motorkraften med den reelle efterspørgsel i stedet for at tvinge fuld hastighed og "styre ned" med tab. Det reducerer ofte energiforbruget, samtidig med at det lettet mekanisk belastning, fordi systemet kører med mindre turbulens, mindre throttling-tab og færre hurtige kontroloscillationer, der irriterer både udstyr og operatører.
En enkel måde at validere besparelser på er at sammenligne den reelle effekt (kW) ved stabiliserede driftspunkter før og efter hastighedsregulering er implementeret, i stedet for kun at stole på navneskilt-antagelser. Denne måle-først vane forhindrer ofte ubehagelige samtaler senere, især når systemkurver, minimumsflow-grænser og kontroljusteringer ændrer udfaldet.
Feltfaktorer, der almindeligvis flytter resultater væk fra lærebogsestimater:
• Systemkurvens form
• Minimum flow og hovedgrænser
• Sensorplacering
• PID-justering
• Bypass eller recirkuleringsadfærd
VFD Egenskaber
En VFDs definerende egenskaber kan sammenfattes i tre resultat-orienterede temaer, der udtrykkes i det samme sprog, folk bruger, når de beslutter, om installationen "virkede":
(1) Blødere opstarter med lavere indsugningsstrøm og mindre elektrisk/mekanisk stress.
(2) Glat, bredt hastighedskontrol gennem frekvensvariation med kontrolleret glidningsadfærd.
(3) Stærk energireduktion på variable momentbelastninger, fordi strømmen falder hurtigt, når hastigheden reduceres.
Når disse temaer anvendes med praktisk justering og procesbevidst kontrollogik, har resultaterne tendens til at være konsistente på tværs af skift og sæsoner, hvilket ofte er hvad teamene faktisk ønsker: færre overraskelser, færre stoppe-linjen begivenheder, og ydeevne der forbliver stabil efter at installationsholdet er gået.
Konklusion
VFD-ydeevne afhænger af meget mere end kun at ændre motorkapaciteten. Stabil drift kræver omhyggelig koordinering af frekvens, spænding, strømregulering, motorparametre, termiske forhold og belastningsadfærd. Forskellige kontrolstrategier balancerer momentrespons, effektivitet, stabilitet og dynamisk ydeevne baseret på anvendelsesbehov. Efterhånden som industrielle systemer kræver højere effektivitet, præcision og pålidelighed, fortsætter VFD-teknologi med at udvikle sig gennem forbedrede kontrolmetoder, beskyttelsessystemer og power-electronic designs, der understøtter moderne motor-drevne applikationer.
Ofte stillede spørgsmål [FAQ]
1. Hvorfor regulerer en VFD spænding sammen med frekvens i stedet for kun at ændre frekvensen?
En VFD justerer både spænding og frekvens for at holde motorens magnetiske flux inden for et stabilt driftsområde. Hvis frekvensen falder uden korrekt spændingsjustering, svækkes fluxen, og momentkapaciteten falder brat, især ved lav hastighed. Hvis spændingen forbliver for høj for den driftsfrekvens, kan motoren trække overdreven magnetiseringsstrøm, hvilket øger varmen og belaster isolationssystemet. At koordinere spænding og frekvens gør det muligt for drevet at opretholde brugbart moment, stabil strømadfærd og forudsigelig termisk ydeevne under skiftende belastningsforhold.
2. Hvorfor stammer mange VFD-problemer, der spores til motorer, faktisk fra drive indgangssiden?
Mange problemer, der tilskrives motorer, skyldes faktisk, hvordan ensretterstadiet interagerer med den elektriske forsyning. Standard diode-ensrettere trækker ikke-sinusformet strøm, hvilket introducerer harmoniske og kan destabilisere svage powersystemer med høj kildeimpedans. Symptomer såsom generende udløsninger, transformeropvarmning, spændingsinstabilitet eller intermitterende fejl opstår ofte fra forholdet mellem drive og det indkommende powersystem snarere end fra motoren selv. Komponenter på indgangssiden som linjereaktorer, DC-link choke og EMI-filtre tilføjes ofte for at stabilisere disse interaktioner.
3. Hvorfor betragtes DC-link kondensatorer som en af de mest stressede komponenter inde i en VFD?
DC-link kondensatorer absorberer ripple-strøm, stabiliserer bus-spændingen og opbevarer midlertidigt energi under hurtige belastningsændringer. Over tid forårsager kontinuerlig termisk stress og ripple-strøm eksponering gradvis forringelse af kapacitansens ydeevne. En drive kan fortsætte med at fungere, selv mens kapacitansen forringes, hvilket kan gøre det svært at bemærke problemet i starten. Til sidst bliver drevet mere følsomt over for spændingsfald, regenerative begivenheder og transiente belastningsændringer, hvilket ofte resulterer i uforståelige udløsninger eller ustabil adfærd, før der sker en total kapacitatorfejl.
4. Hvorfor forbedrer en øgning af PWM bærerfrekvens motorakustik, men øger termisk stress inde i drevet?
Højere PWM-bærerfrekvens producerer glattere motorstrøm og reducerer auditive støj ved at flytte skifteharmoniske over det mest mærkbare høreområde. Dog genererer hver skiftebegivenhed tab inde i IGBT'erne og kraftelektronikken. Når skiftefrekvensen stiger, øges invertertab og intern opvarmning betydeligt. Dette skaber en praktisk ingeniørafvejning mellem en mere stille motoroperation og opretholdelse af en acceptabel termisk margen inde i VFD'en. I mange installationer påvirker indstilling af bærerfrekvens direkte langsigtet pålidelighed og kølekrav for kabinettet.
5. Hvorfor udløser regenerative belastninger ofte DC-overbelastningsfejl under deceleration?
Når en motor decelererer eller drives af selve lasten, begynder den at opføre sig som en generator og returnerer energi til DC-bussen. Hvis den regenererede energi kommer ind i bussen hurtigere, end den kan blive dissiperet eller returneret til nettet, stiger DC-spændingen hurtigt og udløser overbelastningsbeskyttelsen. Denne adfærd påvirkes kraftigt af lastens træghed og decelerationsaggressivitet. Mange problemer med overbelastning løses ved at forlænge decelerationsramperne eller korrekt dimensionere bremsemodstande og regenerative hardware, så de matcher den faktiske mekaniske energi, der er lagret i systemet.
6. Hvorfor præsterer vektorstyring normalt bedre end skalar V/Hz-kontrol ved lav hastighed og under lastændringer?
Skalar V/Hz-kontrol regulerer motorens adfærd indirekte ved at opretholde et omtrentligt spænding-til-frekvens-forhold, hvilket fungerer godt for forudsigelige belastninger som blæsere og pumper. Vektorstyring, især feltorienteret kontrol (FOC), regulerer direkte momentproducerende og fluxproducerende strømkomponenter separat. Dette gør det muligt for drevet at reagere meget hurtigere på lastændringer og opretholde et stærkere moment, selv tæt på nul hastighed. Forskellen bliver især mærkbar i applikationer, der involverer hurtig acceleration, tung startmoment eller følsomme hastighedsreguleringskrav.
7. Hvorfor kan vektorstyrede drev blive ustabile efter temperaturændringer eller motorudskiftning?
Vektorstyring afhænger i høj grad af nøjagtig skøn over motorparametre. Rotormodstand, statormodstand, magnetisk mætning adfærd og kabelforhold kan alle ændre sig under reelle driftsbetingelser. Temperaturændringer og motorudskiftninger ændrer ofte disse parametre nok til at reducere skønets nøjagtighed, især ved lav hastighed, hvor observatormodeller bliver mere følsomme. Systemer, der oprindeligt fungerer gnidningsløst, kan senere udvikle støj, ustabil momentrespons eller inkonsistent hastighedsregulering, hvis motorens model ikke længere afspejler den reelle elektriske adfærd.
8. Hvorfor betragtes autotuning som et af de vigtigste trin under VFD-idriftsættelsen?
Autotuning tilpasser drevets kontrolmodel med motorens faktiske elektriske egenskaber i stedet for kun at stole på navneskiltværdier. Dette forbedrer strømregulering, momentrespons, glidestimat og lavhastighedsadfærd. I mange installationer er autotuning det punkt, hvor systemet går fra blot at fungere til at operere glat og forudsigeligt. Trendene i autotuning-procedurer er særligt værdifulde for applikationer, der kræver stærkt moment ved lav hastighed eller præcis transientrespons, fordi de fanger motorens adfærd under reelle driftsbetingelser.
9. Hvorfor reducerer VFD'er betydeligt energiforbruget på pumper og blæsere sammenlignet med throttling-metoder?
For centrifugale pumper og blæsere følger energiforbruget affinitetslove, hvor energiforbruget ændrer sig omtrent med kuben af hastigheden. Dette betyder, at selv beskedne hastighedsreduktioner kan producere betydelige energibesparelser. Traditionelle throttling-metoder tvinger motoren til at køre med fuld hastighed, mens de mekanisk begrænser strømmen, hvilket spilder energi som tryktab. En VFD reducerer derimod motorens hastighed direkte, så systemet kun producerer den nødvendige strøm eller tryk, hvilket sænker effektbehovet ved kilden i stedet for at dissiperer overskydende energi.
10. Hvorfor skaber moderne VFD-teknologier med hurtig skift mere bekymringer omkring EMI og leje strømme?
Moderne PWM-drev, især dem, der bruger SiC- eller GaN-skifte-sensorer, genererer ekstremt hurtige spændingstransitioner med høj dV/dt. Disse hurtige kanter kan skabe fælles-mode spændinger, elektromagnetisk interferens og udstrømningsstrømme, der passerer gennem motorlejer. Hvis jording, kabelforsegling, filtrering og bonding-praksis ikke udføres korrekt, kan resultatet omfatte for tidlig slid på lejerne, støjende sensorer, kommunikationsinstabilitet eller isolationsstress. I højtydende installationer bliver kvaliteten af kabling og jording ofte lige så vigtig som kontrolalgoritmen selv.
Relateret blog
-
Hvor mange nuller på en million, milliarder, billioner?
![Hvor mange nuller på en million, milliarder, billioner?]()
2024-07-29
Million repræsenterer 106, en let forståelig figur sammenlignet med hverdagens varer eller årlige lønninger. Milliarder, svarende til 109, begynde... -
IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout
![IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout]()
2024-08-28
IRLZ44N er en bredt brugt N-kanals magt MOSFET.Det er kendt for sine fremragende switching -kapaciteter, det er meget egnet til adskillige anvendelser... -
Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?
![Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?]()
2024-10-06
Problemer med opladning af mobiltelefonbatteri er almindelige, men kan styres effektivt.Temperaturen spiller en stor rolle i batterieffektiviteten, da... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024-07-04
BC547 -transistoren bruges ofte i en række elektroniske applikationer, der spænder fra grundlæggende signalforstærkere til komplekse oscillatorkre... -
Omfattende guide til SCR (siliciumstyret ensretter)
![Omfattende guide til SCR (siliciumstyret ensretter)]()
2024-04-22
Siliciumkontrollerede ensretter (SCR) eller tyristorer spiller en central rolle inden for effektelektronik -teknologi på grund af deres ydeevne og p... -
LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger
![LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger]()
2024-07-15
LR621 og SR621SW -knapbatterier er udbredt i kompakte elektroniske enheder som ure, små legetøj, regnemaskiner og fjerntaster.Flere producenter prod... -
Grundlæggende om op-amp-kredsløb
![Grundlæggende om op-amp-kredsløb]()
2023-12-28
I den indviklede verden af elektronik fører en rejse ind i dens mysterier, der altid er til et kalejdoskop af kredsløbskomponenter, både udsøgte o... -
En komplet guide til multiplexere og deres rolle i digitale systemer
![En komplet guide til multiplexere og deres rolle i digitale systemer]()
2025-09-20
Multiplexere er komponenter i digitale systemer, designet til at kanalisere flere indgangssignaler til en enkelt outputlinie ved hjælp af binære log... -
Sammenligning af NMOS- og PMOS -forskelle og applikationer
![Sammenligning af NMOS- og PMOS -forskelle og applikationer]()
2024-11-15
At forstå forskellene mellem NMOS og PMOS -transistorer er vigtige for at designe effektive kredsløb.NMOS (N-type metaloxid-halvleder) og PMOS (P-ty... -
CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide
![CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide]()
2025-09-15
Knapbatterier som CR2450 og CR2032 strøm mange hverdagens elektronik, fra ure og fjernbetjeninger til medicinske og industrielle enheder.Selvom de er...










Hot Dele
- SY89829UHY
- MTMC8E280L
- GRM0335C1H3R9BA01J
- TIP36C
- S29GL128P11TFIV20
- AD8642ARZ-REEL7
- F950J107MQAAQ2
- C0603JB1E223K030BB
- LT8301IS5#TRPBF
- TLE5230GS
- UPD179324GB-522-8ET
- LB1848M-TE-R
- C3216X8R2A683M115AA
- ACPM-7313-TR1
- MT29F256G08CBCBBJ4-37:B
- MN101CP52ABL
- LT1257IS8
- DS1340U-3+T
- CY2309SI-1T
- GCM1885G1H390JA16D
- GRM1555C1E5R5DA01D
- CC0402ZRY5V7BB334
- IS24C32C-2ZLI-TR
- AD5541AARMZ
- IS43R16320D-6TLI
- LM2574MX-3.3
- IDT74LVCH16601APF
- GRM033R61C222KA88D
- MIC68400YML
- CGA1A2X7R1C102K030BA
- LC15007-TBM-EV
- 2FI300S-140
- TMP86FS23UG-7AB1
- IP-B50-CW-TR1
- PM8379-BI
- V24C48C100BL2
- MAX7414EUA+T
- T491D106K035AT70277280
- MB95F418KPMC-G-SNE2
- VI-J72-EY
- VE-J3Z-MZ
- MAX3869EMAC+
- TPS650832ZCGT
- MAX3816ACUE
- PSB21525H
- S29GL032A90FFIR23
- LA4585M-TLM
- 51296-5494
- 104X125DA089
- TJA1101BHN/0Z