- Dansk
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC forklaret: Funktioner, typer og anvendelser
Katalog
Udforskning af PMIC
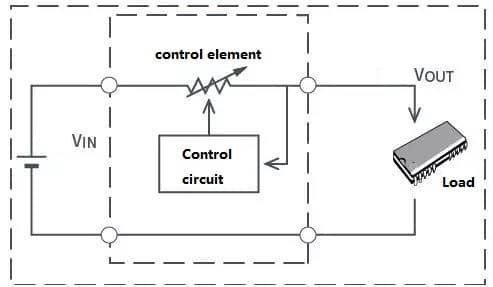
En PMIC (Power Management Integrated Circuit) er en dedikeret IC, der modtager en eller flere strømindgange og producerer flere regulerede, kontrollerede strømføringer til de forskellige belastninger på et board. Disse belastninger inkluderer ofte processorer, hukommelse, RF-sektioner, sensorer og forskellige periferiudstyr.
I stedet for at sprede diskrete regulatorer og tilsyns-IC'er over designet, konsoliderer en PMIC dem til en koordineret strømdomæneadministrator. For mange teams bringer denne konsolidering også en vis sindsro under opstart, fordi der er et sted at se, når strømføringer opfører sig mærkeligt.
Processorer, hukommelse, RF-blocks, sensorer og andre belastninger.
Funktionelt omfang
I reelle produkter strækker en PMIC's bidrag sig langt ud over spændingskonvertering. Den praktiske fordel viser sig, når den fungerer som en systemniveau strømkoordinator, der binder flere ansvarsområder sammen, som naturligt interagerer under opstart, runtime belastningstrin og fejlsituationer.
Konvertering
En PMIC kan kombinere forskellige regulator typer, så effektivitetsfokuserede strømføringer og støjsensitive strømføringer kan optimeres separat. I praktiske design er den primære bekymring ofte ikke at generere den nødvendige spænding, men at opretholde stabil spænding under belastningsændringer, opstartshændelser og andre krævende driftsbetingelser.
Buck regulatorer, boost regulatorer, buck-boost regulatorer og LDO regulatorer.
En strømføring, der ser ren ud ved en stabil belastning, kan blive synligt stresset under reelle profiler. Effektivitet, ripple, transient respons og termisk margen undersøges ofte tæt, når CPU-burst strømme, RF- transmissionspulser eller sensorprøve spidser testes under reelle driftsbetingelser.
CPU-bursts, RF-transmitpulser og sensorprøve toppe.
Distribution
Når strømføringer er genereret, dikterer en PMIC ofte, hvordan de deles, skiftes og isoleres. Her kan et design føles enten robust eller skrøbeligt, især under hot-plug, brownout og kabel-relaterede begivenheder. Når distributionen håndteres omhyggeligt, kontrolleres indstrømning, backfeed-veje begrænses, og en fejl er mindre tilbøjelig til at kaskadere ind i et board-omfattende kollaps.
Rail aktiverer, belastningskontakter, strømbegrænsning og ideel-diode ORing for multi-kilde indgange.
Detektion og tilsyn
De fleste PMIC'er integrerer tilsynsprogrammer, der kontinuerligt overvåger strømførings sundhed og giver signaler, som firmware og hardware kan tolke. I et laboratorium stopper disse funktioner hurtigt med at føles som pæne tilføjelser og begynder at føle som forskellen mellem en ren debug-session og en dag brugt på at jagte en reset, der nægter at reproducere på efterspørgsel.
Undervoltage monitor, overvoltage monitor, overcurrent detektion, termisk sensing, og power-good signalering.
En lektion, der har en tendens til at sidde fast hos erfarne bring-up teams, er at power-good tærskler og deglitch timing skal være entydige. Når de er vage eller dårligt tilpasset systemet, er resultatet ofte falske nulstillinger eller ghost boot-fejl, der kun optræder ved temperaturhjørner, på visse batterier, eller efter en sekvens af hurtige genstart.
Kontrol og sekventering
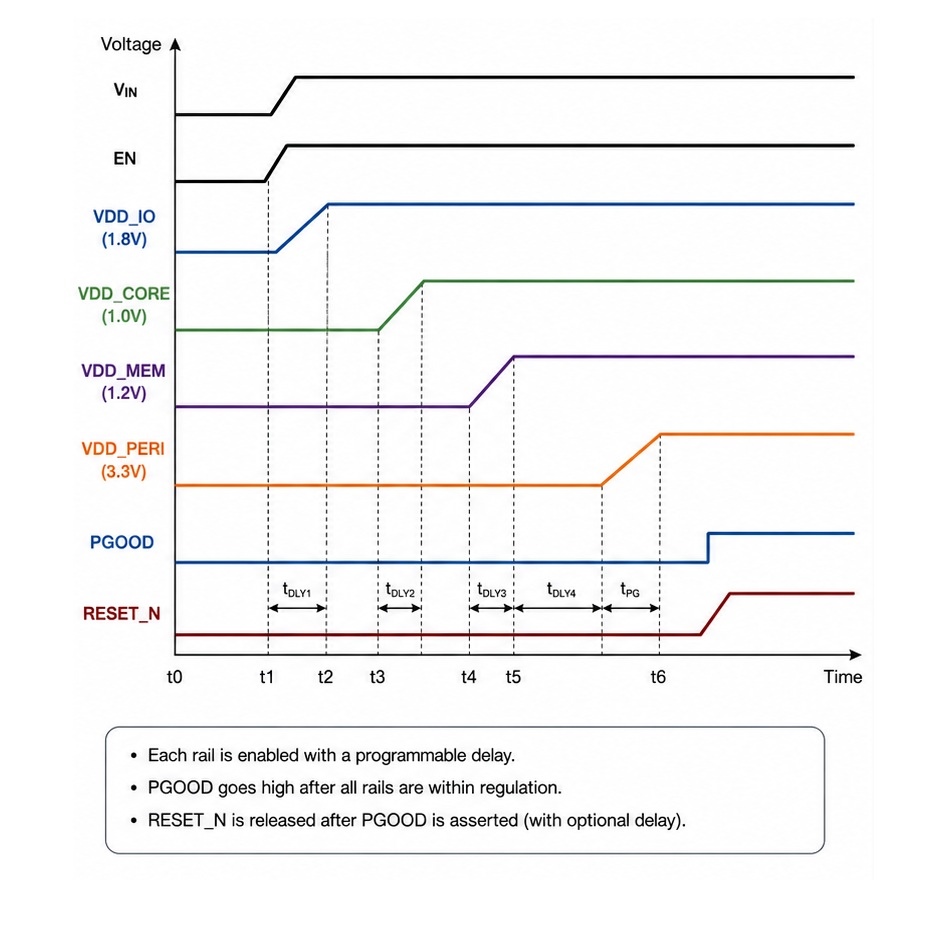
En PMIC inkluderer ofte mekanismer til at forme, hvordan rails stiger, falder, og koordinerer med hinanden. Disse detaljer viser sig som konkrete resultater: om et system starter gentageligt, om komponenter ser undgåelig stress, og om boardet vender tilbage til en kendt tilstand efter en fejl.
Sekventering, soft-start, ramp shaping, discharge paths, og konfigurerbar inter-rail timing.
Et digitalt system kræver typisk ikke kun korrekte steady-state spændinger; det forventer også, at disse rails ankommer i en bestemt rækkefølge og inden for afgrænsede tidsrelationer. Hvis skråningerne er for stejle, for langsomme, eller simpelthen misordnet, kan interne strukturer og domæner ende i ubestemte tilstande, der er maddening intermittente, især omkring SRAM retention-adfærd og hurtig interface bring-up.
Interne ESD strukturer, SRAM retention domæner, og højhastigheds interfaces.
Hvad der har en tendens til at forme resultaterne i virkelige designs
Når et team skifter fra et blokdiagram til en fungerende prototype, lykkes eller fejler PMIC valg og konfiguration ofte på operationelle detaljer snarere end marketing-niveau specifikationer. De subtile problemer er dem, der skaber tidsplanpres, fordi de dukker op sent og sjældent præsenterer sig selv som en enkelt, åbenlys årsag.
Håndtering af hurtige transienser og dynamiske belastninger
Moderne processorer og RF-sektioner kan kræve store strømtrin på mikrosekund tider. En PMIC kan se helt acceptabel ud på papir og stadig vise droop, overshoot, eller ringing, når kontrolsløjfen, kompensationstilgangen, outputnetværket og PCB parasitikere tvinges til at interagere i det virkelige layout.
Droop, overshoot, og ringing.
Teams, der tester transiente respons tidligt, gør det ofte, fordi de har følt smerterne ved at opdage det sent. Tidlig validering kan reducere chancerne for en ubehagelig redesign cyklus, der involverer induktorer, output-kondensatorer, kompensationskomponenter, eller selv PMIC-valget.
Induktorer, kondensatorer, kompensationskomponenter, og PMIC'en selv.
Sekventering som et system contract, ikke en bekvemmelighed
Power sekventering fungerer bedst, når det behandles som en kontrakt på tværs af silicium krav, firmware antagelser, og brætadfærd. Når ramp rates og power-good timing driver væk fra, hvad processor datasheet forventer, eller hvad firmware implicit antager, har intermitterende bootproblemer en tendens til at dukke op.
Processor datasheet krav og firmware forventninger.
Hvad der gør disse problemer særligt frustrerende er deres tendens til at forsvinde under venlige testbetingelser og vende tilbage under temperaturgrænser, batteri hot-plug, eller marginale forsyningsforhold. I disse miljøer reducerer deterministisk sekventering og forudsigelig nulstillingsadfærd overraskelser og forkorter debug-cykler.
Temperaturhjørner, batteri hot-plug begivenheder, og brownout-lignende forhold.
Beskyttelsesadfærd som en oppetid og serviceomkostningsleverage
Overstrømsgrænser, termisk nedlukning, og UV/OV beskyttelser diskuteres ofte i sikkerhedens sprog, men udleverede produkter oplever dem som tilgængelighedsfunktioner. En PMIC, der begrænser strømmen skånsomt, rapporterer fejl med tilstrækkelig klarhed til at være handlingbar, og genopretter på en kontrolleret måde kan forhindre en mindre perifer fiasko i at blive til en fuld systemnedbrud og en supportticket.
Beskyttelsesmekanismer: Overstrømsbeskyttelse, termisk nedlukning, undervoltsbeskyttelse, og overspændingsbeskyttelse.
System pålidelighedsfordele: Skånsom strømbegrænsning, fejlrapportering, og kontrolleret genopretning.
Det er ofte mere præcist, og ærligt talt mere nyttigt under designafvejninger, at tænke på PMIC'en som en del af systemets pålidelighedsarkitektur snarere end bare som en strømkonverter. Designs, der ældes godt, har tendens til at vælge en PMIC baseret på, hvor konsekvent den håndhæver forudsigelige strømtilstande på tværs af normal drift, fejlbehandling, og overgange.
Når det synspunkt tages alvorligt, begynder detaljer, der er lette at nedtone under tidlig planlægning, at læse anderledes under integration. Rail discharge adfærd, power-good signalintegritet, og fejltelemetri bliver de egenskaber, der adskiller en enhed, der blot tændes i laboratoriet fra en enhed, der starter rent, gentageligt, og forudsigeligt i felten, uden at ingeniørteamet skal have held.
PMIC Kategorier
PMIC'er er ofte mærket med en overskrift funktion, men i forsendelseshardware opfører de sig ofte som et kompakt, koordineret powersubsystem snarere end en enkeltkomponents funktion. En praktisk måde at sortere PMIC-typer på er at se på (a) hvad de regulerer, (b) hvad de begrænser eller håndhæver, og (c) hvad de forbinder, frakobler eller aktivt driver. Set fra et systemopstarter perspektiv er skillelinjen, der konstant dukker op, mindre om lineær versus switching og mere om, hvorvidt PMIC'en er bygget til at håndtere rail-til-rail interaktion under ændrende belastning. Når denne interaktion håndteres gennemtænkt, føler boards sig roligere under stresstests; når den ikke gør, kan det samme design se godt ud på en bænkskuffe og blive lunefuldt i et fuldt samlet produkt.
Primære funktionelle grupperinger
Disse blokke genererer rails, sætter driftspunkter og absorberer ændringer i inputbetingelserne. De dækker typisk alt fra lavstrøm stille rails til højstrøm digitale domæner.
• Lineær regulering (LDO'er)
• Switching regulering (buck, boost, buck-boost, invertering, ladepumper)
• Front-end konvertering og forregulering (AC/DC-adaptere, USB-PD sink-faser, automobil præ-regulatorer på nogle platforme)
Disse blokke former, hvordan strøm får lov til at opføre sig ved at definere tærskler, overvåge grænser og reagere på fejl. De leverer måske ikke watt, men de beslutter ofte, om et system fejler rent eller fejler mystisk.
• Spændingsreferencer og båndgaps
• Supervisorer, overvågninger og vindueskomparatorer
• Resetgenerering, watchdog-timere og brownout-detektion
• Sequencing, tracking og fejlrespons (UV/OV, overstrøm, termisk respons)
Disse blokke bestemmer, hvor energi strømmer, hvornår det er isoleret, og hvordan eksterne belastninger drives. I virkelige designs er de, hvor kant tilfælde, hot-plug, kabelsænk, tilbehørsfejl, har tendens til at komme først til syne.
• Power-path management
• Lastswitches og eFuses
• Batteriopladning
• displayrelaterede rails og drivere
• MOSFET gate-drivere
Regulering/konverteringstyper
LDO'er vælges ofte, når lav outputstøj, ligetil designflow og hurtig småsignal-opførsel er ønskelige. De dukker ofte op på RF-blokke, lydrails, præcisionssensorer og ADC-referencerelaterede forsyninger, hvor ripple spur kan blive til målbar præstationsnedgang.
Varme er ofte den begrænsende faktor i regulatorers ydeevne. Efterhånden som spændingsforskellen mellem input og output stiger, eller belastningsstrømmen stiger, kan effektafledning og temperatur blive vigtigere end elektriske nøjagtighedsspecifikationer.
Et power rail, der ser stabilt ud under åbne bænktests, kan udvikle betydelige varmeproblemer indeni lukkede systemer eller højtemperaturmiljøer, hvor luftstrøm og termiske margener er reduceret.
Buck-konvertere bærer meget af arbejdsbyrden for effektive kernerails: anvendelsesprocessorer, DSP'er, DDR-rails og andre højstrøm digitale domæner. I praksis kan to boards, der bruger den samme buck, opføre sig meget forskelligt afhængig af kontroltilstand, driftsmetoder ved let belastning og layoutdrevet parasit.
• Kontrolmetode (spændingstilstand, strømtilladelse, hysteretisk, konstant on-time)
• Let-belastningsadfærd (PFM, pulsforskydning, tvungen PWM)
• Transiente respons versus output ripple trade-offs
• EMI-holdning (spredningsspektrum muligheder, skiftefrekvens valg, layoutfølsomhed)
En detalje, der har tendens til at skære designanmeldelser, er belastningsprofil realitet. En konverter, der ser fremragende ud ved 2 A, kan bruge det meste af sit liv ved 20-200 mA, hvor tilstandsovergange, gate-ladningstab og switching overhead dominerer. At sammenligne kun peak-effektivitet værdier kan føre til, at batteriets levetid i reel drift bliver værre end forventet ud fra indledende estimater.
Boost-konvertere anvendes normalt, når målrækken skal overstige kilden, almindelige eksempler inkluderer at generere 5 V fra et enkelt celler batteri, skabe display bias rails eller fodre LED-strenge. Buck-boost topologier foretrækkes, når input kan krydse over og under den ønskede output, såsom at opretholde et stabilt systemrail på tværs af hele batteriets afladningskurve.
Disse konvertere opløser ofte systemniveau hovedpine, som at holde en 5 V domæne stabilt, mens batteriet synker, men den lettelse kommer med flere bevægelige dele: kompenseringskompleksitet, switch-strømgrænseadfærd, og lednings-EMI, der kan være overraskende følsom over for boardgeometri og kabelbetingelser.
I telefoner og små IoT-moduler er AC/DC-blokken ofte uden for produktet, men front-end forhandling og inputbeskyttelse lander i stigende grad inde i enheden. Selv når et datablad markedsfører disse som USB-funktioner i stedet for PMIC-funktioner, former de stærkt nedstrøms konverterstørrelse, varmefordeling og værst tænkelige stress.
• USB-PD registrering og forhandlingssupport
• Input strømbegrænsning og inrush kontrol
• Over-spændingsbeskyttelse for USB-tilbehør og adaptere
Præcisionsunderstøttelsesblokke
Referencer for ankerpræcision for ADC'er, DAC'er og komparatortröskler. I mixed-signal produkter er de detaljer, der konsekvent betyder noget, drevopførsel, støjtæthed og PSRR på tværs af det relevante frekvensområde. Det kan føles modstridende, men en lille mængde referencestøj kan vise sig som målbar jitter, sensorfejl eller tröskelusikkerhed, når den ganges med virkelige verdensforstærkning og filtreringsvalg.
Supervisorer overvåger skinner for undervoltage, overspænding og sekvenseringsovertrædelser. I multi-skinne systemer hjælper de med at undgå halvdøde tilstande, hvor et domæne starter op og begynder at eksekvere, mens et andet domæne er sent, brunt eller oscillerende.
Fra et pålidelighedssynspunkt har robust overvågning tendens til at reducere den slags intermitterende feltreturer, der frustrerer alle: problemer, der kun optræder under kolde starter, lav-batteri opstart, hurtige hot-plug events eller grænseterninger, som aldrig var på lab’s “glade vej.”
Sekvensering er mere end skinne A så skinne B. Det bliver en diskussion om timingtolerance stabler, rampeskråninger, nulstillingsforhold og hvad systemet gør, når en skinne går glip af sit vindue.
SoC-dokumentation specificerer ofte IO- før-kerne afhængigheder, hukommelsestræningsbegrænsninger og præcise nulstillingsdeassertionstiming. PMIC'er med programmerbar sekvensering og kontrollerede ramper kan reducere ekstern limlogik og få opstart til at føles mindre som gætterier, især når boards itererer hurtigt og små timingændringer kan spare dage i fejlfinding.
Strømvej og drivefunktioner
Strømvej-logic beslutter, om systemet kører fra USB, batteri, eller en blanding af begge, og det påvirker, hvad der sker under overgange.
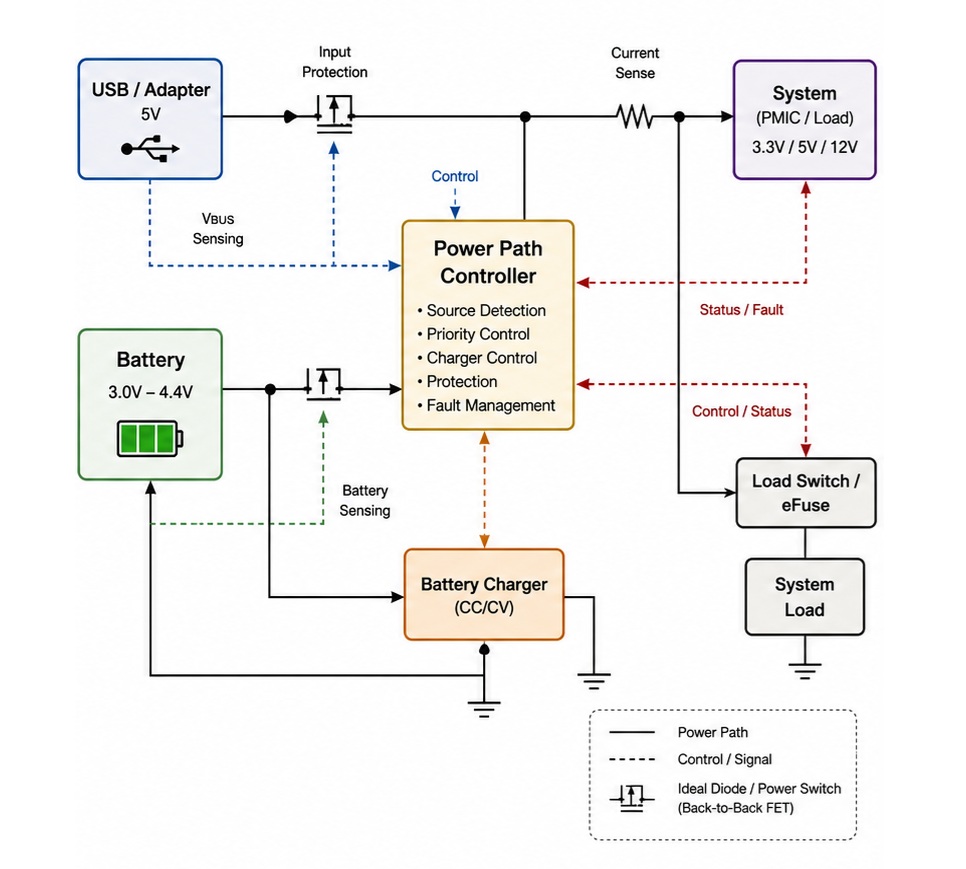
• Problemfri switchover adfærd (begrænsning af droops, der udløser nulstillinger)
• Input strømbegrænsning for at matche USB/adaptere og overholdelsesbegrænsninger
• Idealt diodetilstand for at reducere baglæns strøm
En tilbagevendende fælde i virkeligheden er at undervurdere modstand i kabler, stikforbindelser og beskyttelseselementer. Under en hurtig transiente kan PMIC'en opføre sig præcist som designet, og systemet kan stadig brune ud, fordi den opstrøms vej synker mere end modellen antog. De fejlsituationer føles "uretfærdige", indtil den fulde vejimpedans måles og behandles som en del af designet, ikke som en fodnote.
Opladere varierer i batterikemi understøttelse, kredsløbstopologi, termiske egenskaber og designmål. Fælles prioriteter inkluderer hurtigere opladning, lavere overfladetemperatur, reduceret EMI, eller opretholdelse af systempræstation mens opladning.
• Lineære opladere
• Switching opladere
• Power-bank/OTG tilstande
Valg falder ofte ned til termisk budget, regulerings- eller interoperabilitetsbegrænsninger, og om enheden forventes at opretholde fuld ydeevne mens opladning uden at føles sløv eller køre ubehageligt varm.
Load switches bruges ofte til at styre skinner for standby-strømreduktion og til at isolere domæner under fejl- eller forsendelsestilstande. eFuses tilføjer programmerbare strømgrænser, fejltimere og kontrolleret opstartadfærd.
I mange produkter betaler disse blokke for deres boardareal ved at forvandle rodet fejlfunktioner, stikfejl, tilbehørsfejl, forkert tilslutningshændelser, til kontrollerede hændelser i stedet for kaskader af nulstillinger eller fysisk skade, der er dyrt at diagnosticere og endda sværere at reproducere.
Displaysystemer kræver ofte flere strømrails som AVDD, VGH og VGL med omhyggeligt kontrolleret opstart sekvensering for at undgå synlige display artefakter. LED-drivere skal også regulere strømmen nøjagtigt og reagere pålideligt på åben-streng og kortslutningsfejl, fordi disse forhold ofte opstår under drift.
Gate-drivere og højere effekttrin bliver mere og mere relevante i robotik, bilindustrien og industrielle udstyr, hvor motorstyring og høj-volts konvertering krydser med PMIC-stil koordinering, telemetri og beskyttelsespolitikker.
Den typiske “Phone/IoT PMIC”
I mange telefoner og kompakte IoT-moduler forstås en PMIC bedst som en bevidst blanding af blokke fremfor en enkelt kategori. Integrationen har normalt til formål at reducere PCB-område, forenkle sekvensering og give firmware et enkelt sted at observere og påvirke strømadfærden.
• Flere høj-effekt buck-convertere til CPU, GPU, hukommelse og altid-tændte rails
• En eller flere LDO'er til lav-støjs analog og RF rails
• Oplader og strømvej kredsløb til USB og batteri koordinering
• Monitorer, sekvenserere, termisk kontrol, og afbrydelsesrapportering til telemetri og fejlhåndtering
Hvad der ofte dominerer resultaterne, er rail-interaktion. En buck-transient kan koble sig til en RF LDO gennem delt jordimpedans. Opladerens termiske foldback kan stille og roligt sænke den tilgængelige systemstrøm, og den ændring kan trække en kernerail ind i droop under en arbejdsbyrde-spike. Designs, der evaluerer hver blok isoleret, ser ofte klare ud i tidlige bænktests og bliver derefter vanskelige under integrerede stresstests, når alt skifter, opvarmes og forhandler samtidigt.
Valg og integration
Switching-regulatorer vælges typisk for at reducere dissipation, men de kan introducere ripple og EMI, der spreder sig ind i følsomme områder. LDO'er dæmper ofte støj, men omkostningerne viser sig som varme, når spændingsfriheden er generøs, eller strømmen er ikke-triviel.
• Switching-regulatorer: højere effektivitet, mere arbejde med ripple/EMI-håndtering
• LDO'er: lavere støj, højere varmeafgivelse ved faldende spænding
En kompromis, der ofte fungerer godt, er at bruge en buck til at skabe en mellemliggende rail, og derefter bruge en LDO til den endelige følsomme rail, så længe frihed og termisk adfærd blev planlagt bevidst i stedet for at blive efterladt efter andre beslutninger.
Hurtige belastningsændringer kræver hurtige kontrolsløjfer, ordentlig kompensationsdesign og tilstrækkelig output-kapacitans for at opretholde stabil regulering i de første mikrosekunder af respons. Valg af kondensator indebærer mere end blot at øge kapacitans. Effektiv kapacitans kan falde på grund af DC-bias, temperaturændringer og ældning. ESR og ESL påvirker også kredsløbets stabilitet, transiente respons og EMI-ydeevne, hvilket gør dem til vigtige designovervejelser.
Hold, der validerer med den nøjagtige kondensatordielectric, spændingsrating og kabinetsstørrelse, som er beregnet til produktion, undgår ofte overraskelser med stabilitet i den sene fase, især når forsyningskæder tvinger ækvivalente substitutioner, der kun er ækvivalente på papiret.
PMIC-adfærd under fejl kan designes omkring forskellige filosofier. En tilgang forsøger elegant nedbrydning, browout-håndtering, throttling-hint til processoren, selektiv railafladning, så systemet forbliver brugbart i en reduceret tilstand. En anden tilgang håndhæver deterministisk nedlukning for hurtigt at nå en kendt sikker tilstand.
• Elegant nedbrydning: ofte tilpasset brugeroplevelsesmål i forbrugsprodukter
• Deterministisk nedlukning: ofte tilpasset forudsigelig adfærd i sikkerhedsfokuserede designs
Den PMIC, der passer bedst, er som regel den, hvis sekvensering og fejlrespons matcher produktets tiltænkte adfærd, ikke den, der tilfældigvis reklamerer for den længste tjekliste.
Højere switching-frekvenser og bredbåndsgap-strømtrin øger den opnåelige effekttæthed, men de skaber også strengere PCB-layoutkrav og større EMI-følsomhed. Samtidig bliver softwarefunktioner såsom telemetri, afbrydelser, loggingsfunktioner og programmerbare kontrolpolitikker vigtige faktorer i den samlede energihåndtering og integration.
PMIC'er, der opretholder forudsigelig strømadfærd under reelle arbejdsbyrder, kan i høj grad reducere fejlfindingstiden, især i systemer, der samtidig håndterer radioer, processorer, opladningsoperationer og termiske grænser.
PMIC Anvendelsesområde
PMIC'er dukker op, hvor elektrisk energi skal konverteres, distribueres, sekvenseres, observeres og beskyttes, mens tab og interferens holdes under kontrol. De bruges rutinemæssigt i forbruger-, erhvervs-, bil- og industrielle designs, men skillelinjen er normalt ikke slutmarkedet, men hvordan strømtræet ser ud i praksis. I det øjeblik et produkt indeholder flere rails med forskellig støjtolerance, forskellig step-load adfærd og forskellige fejlforventninger, stopper PMIC med at føles som et "delvalg" og begynder at fungere som en formende kraft på systemadfærden. I mange reelle designs, når en højtydende processor er parret med radioer, sensorer, hukommelse og højhastigheds-I/O, ender energiaritekturen med at begrænse, hvad platformen konsekvent kan levere, selv når computeren og softwaren ser solide ud på papiret.
Hvor PMIC Adfærd Begrænser Resultater i Den Virkelige Verden
Belastningstransientrespons, der stille og roligt sætter loftet
Moderne CPU'er og GPU'er trækker pludselige strømtrin under boost- og burst-aktivitet, og disse trin kan være overraskende ubarmhjertige. Når PMIC'ens kontrolsløjfe, outputkapacitans og distributionsimpedans ikke kan holde railen inden for stramme grænser, reagerer softwarehold ofte på subtile, men kostbare måder: de forkorter boost-vinduer, barberer peak-clock eller indsætter bredere beskyttelsesbånd, så nedbrud ikke vises i marken. Fra et ingeniørperspektiv kan det kompromis føles frustrerende, fordi platformen kan se effektiv ud, mens den stadig efterlader ydeevne på bordet under realistisk trafik.
Teams, der kun validerer med statiske belastninger eller pæne laboratoriemønstre, har tendens til at lære dette sent. Virkelige arbejdsbelastninger skaber takkede kanter: korte spile-pause, AI-inferens-toppe og radio-samlevnevent kan producere spændingsfald, der aldrig optrådte, når banen blev testet med en godartet bænkemodel. Den ubehagelige lektion er, at gentagelig transiente adfærd under rodet arbejdsbelastninger ofte giver mere brugbar ydeevne end at jagte et flatterende effektivitetstal på et enkelt driftspunkt.
Ripple og bredbåndsstøj, der bliver til signalintegritetsgæld
Ripple bør ikke kun behandles som en analog ydeevneparameter. Skift harmonikker og bredbåndsstøj kan påvirke ADC-opløsning, øge RF-fase støj og reducere SERDES signalmargen, især når strømførende baner deler returreveje eller kobles gennem pakke- og PCB-induktans. En spændingsbane, der ser ren ud i enkeltbane-test, kan opføre sig meget anderledes nær højhastighedsgrænseflader, antenner eller tætte hukommelsesafsnit.
Layout-realiteter ændrer også historien. Mekaniske begrænsninger og holde-uden-regioner tvinger til kompromiser, og disse kompromiser kan forstærke koblingsveje, der var usynlige i et ideelt layout. I praksis opnår en strømløsning tillid, når den forbliver stabil og stille under imperfekt placering og ikke-ideel routing, ikke kun når den måles i en bedst mulige demo konfiguration.
Opstart og sekvensering, der former pålidelighedsresultater
Strømopstarts rækkefølge og rampadfærd afgør, om hukommelsestræning gennemføres konsekvent, radioer kalibrerer uden mærkelige hjørnefejl, og altid-aktive domæner forbliver stabile under brune udskæringer. Marginal sekvensering producerer ofte den slags fejlmønster, der dræner tid og moral: “en ud af halvtreds boot”, hård at reproducere og endnu sværere at debugge, når systemet er fuldt integreret.
Sekvensering fungerer ofte bedre, når det håndteres som en del af nulstilling og genopretningsadfærd snarere end en sen tjekliste. Designs, der holder til produktionen, behandler normalt hele strømopstarts-/strøm-ned funktionen som en gentagelig tilstandsmaskine, og beviser derefter dette under værst mulige rampehastigheder, kolde temperaturer og lave batteriforhold. Automatiseret strømcykling er ofte hvor tillid opnås, fordi det afslører de intermitterende kanter, som et par manuelle strømskift aldrig afslører.
Udvælgelseskriterier som system handelsrum
Effektivitet vurderet på tværs af tilstande, ikke som et trofænummer
Effektivitet ændrer betydning afhængigt af, hvordan produktet faktisk bruger sin tid. Topbelastningseffektivitet kan synes imponerende i specifikationer, men faktisk batterilevetid og termisk ydeevne afhænger af mange driftsbetingelser, herunder burstbehandling, normal belastning, let belastning og dyb-søvn drift. Skifte tab, ledningstab og hvilestrøm konkurrerer forskelligt i hver region, og "vinderen" skifter med arbejdsbelastningsprofilen.
For batteridrevne designs viser lav Iq og stærk let-belastningseffektivitet ofte direkte som længere tid mellem opladninger, som produktteams har en meget konkret interesse i. For servere og netværkudstyr dominerer ledningstab og termiske begrænsninger normalt, fordi vedvarende strøm og varmefjernelse bliver den daglige virkelighed. En jordet måde at beslutte på er at kortlægge effektivitetmål til tidsfordelingen af arbejdsbelastninger, i stedet for at optimere et driftspunkt, der næsten aldrig finder sted i marken.
Termisk hovedrum, der forhindrer ydeevne i at kollapse under varme
Termiske grænser definerer ofte den maksimale bæredygtige strøm, som igen definerer den maksimale vedvarende beregning. En PMIC kan se elektrisk fremragende ud og stadig misse systemmål, hvis dens pakke, kobber og placering skaber lokale hotspots nær hukommelse, skærmdose eller temperaturfølsomme RF-blokke. I virkelige samlinger kan små temperaturstigninger udløse nedsænkning, beskyttelsesgrænser eller langsigtede pålidelighedsproblemer, som ingen ønsker at forklare efter lanceringen.
Designs, der ældes godt, planlægger normalt for termisk slack. Denne planlægning viser ofte som pakke-termiske egenskaber, der matcher belastningen, multi-fase kapabilitet, når strømprofilen retfærdiggør det, og en layoutstrategi, der spreder varme, mens den holder strømsløjfer korte nok til at undgå at omdanne termiske rettelser til støjproblemer.
EMI-begrænsninger, der oppuster tidsplan og iterationsomkostninger
Skiftfrekvens, kant-rater og kontroltopologi påvirker stærkt, om EMI kan håndteres med ligetil filtrering eller bliver en cyklus af kortlægning og sene lab-sessioner. Datasheet overholdelse er kun en del af historien; layoutfølsomhed kan dominere resultaterne. En løsning, der kræver næsten perfekt løbkonstruktion, kan blive et væddemål, når mekaniske begrænsninger tvinger akavet placering.
Mange teams ender med at foretrække en lidt langsommere, mere kontrollerbar løsning, en med håndterbare slew rates og forudsigelig spektre adfærd, fordi det reducerer debug tid og sænker certificeringsrisiko. Det valg kan føles konservativt, men det stemmer ofte overens med realiteten, at EMI-problemer ofte opstår sent, når tidsplanen er mindst tilgivende.
Beskyttelsesfunktioner, der definerer fejloplevelse og serviceadfærd
Beskyttelsesadfærd påvirker systemets respons under fejlforhold. OCP, OVP, OTP og kortslutningsbeskyttelsesindstillinger kan afgøre, om systemet udfører en ren nedlukning, går ind i latch-off-tilstand eller gentagne gange genstarter med ustabil adfærd. Disse responser påvirker direkte fejlfindingens sværhedsgrad, supportkrav og den overordnede opfattelse af produktets pålidelighed.
Beskyttelsesindstillinger interagerer også med normale driftsbegivenheder. Aggressiv strømbegrænsning kan reducere skaderisiko, men det kan også udløse gentagne nulstillinger under inrush-tunge øjeblikke eller opstarts spikes. Fejlhåndtering fungerer typisk bedst, når det er finjusteret som en del af den tiltænkte servicetaktik, der beslutter, hvad der skal forsøges igen, hvad der skal låses, hvad der skal logges, og hvad der skal fejle hurtigt, fremfor at være tilbageholdt som standard registerværdier.
Integrationsomkostninger, der inkluderer firmware, validering og debug realitet
Integrationsomkostninger stopper sjældent ved BOM og PCB-område. Det inkluderer firmwarearbejde, valideringsomfang, testtid, fremstillingsrobusthed og debugbelastningen, når noget ikke opfører sig som forventet. Højt integrerede PMIC'er kan reducere komponentantallet, hvilket er tiltalende, men de koncentrerer også risikoen: en sen justering på en rail kan udløse re-qualifikation af en større del af strømtræet, end teamet havde planlagt.
Mere diskrete tilgange kan øge layoutindsatsen og dele administration, men de kan også tilbyde modulær struktur og lettere substitution, hvis forsyningskædeforholdene ændrer sig, eller hvis midtvejsopdateringer forventes. Det mere ærlige valg er programmets risikovillighed: tidsplanfølsomhed, forventet iterationsantal, og hvor ofte designet sandsynligvis vil blive revideret efter første frigivelse.
Digitale strømfunktioner: Fleksibilitet, der kommer med betingelser
Telemetri, programmerbare rails og dynamisk spændingsskalering kan bringe reelle fordele: strammere strømoptimering, klarere fejldiagnose og adaptiv præstationsskalering, der følger arbejdsbyrden og temperaturen. Samtidig trækker disse funktioner firmwareafhængigheder, konfigurationskontrol, produktionsprogrammeringsdisciplin og helt nye fejldomæner, der ikke eksisterer i enklere analoge konfigurationer. Telemetri bliver kun værdifuld, når de indsamlede data aktivt bruges til overvågning og designbeslutninger i stedet for at forblive ubrugte på diagnostiske dashboards.
Fra et praktisk synspunkt tjener digital strøm sine penge, når det lukker en målelig løkke. Hvis programmerbarheden kan bruges til at genoprette udbyttet, forlænge batterilevetiden eller forhindre termisk throttling med kontrollerede strategier, bliver det en stærk hebel. Hvis det aktiveres blot fordi det er tilgængeligt, bliver det ofte til en ubenyttet konfigurationsflade, der komplicerer validering, øger risikohåndtering ved fremstilling og skaber tvetydighed om, hvilke indstillinger der virkelig er tilsigtet.
En praktisk udvælgelsess- og valideringsflow, der følger systemets adfærd
En arbejdsproces, der plejer at holde under pres, starter fra systemadfærds mål snarere end at skanne en PMIC katalog og håbe at pasformen fungerer senere. Den opdeler problemet i konkrete, testbare bidder og tvinger klarhed om, hvad god adfærd betyder før board bring-up.
• Konverter arbejdsbyrde transiente til rail krav (tilladt droop, stabiliseringstid, maksimal strøm, repetitionshastighed).
• Definer støjbudgetter for følsomme blokke (ADC, PLL, SERDES, RF) og kortlæg dem til ripple grænser og layoutantagelser.
• Angiv sekvensering, nulstillingsafhængigheder og brownout-genopretning som en tilstandsmaskine.
• Vurder EMI-risiko tidligt med realistiske placering begrænsninger og den tiltænkte skjoldningsmetode.
• Valider beskyttelsesadfærd med fejlindsprøjtning, der ligner rigtige kortslutninger, kabelbegivenheder og batterisvigt.
ADC / PLL / SERDES / RF
Denne tilgang reducerer overraskelser i sen fase, fordi den behandler PMIC som mekanismen, der styrer strømadfærd på systemniveau, ikke som en baggrunds-service. Når strømdesign er som et førsteklasses subsystem, bliver præstation mere konsekvent, pålidelighed lettere at forsvare med data, og overensstemmelsesarbejde plejer at være mere forudsigelig, samtidig med at teamet bruger mindre tid på at jagte intermitterende fejl, der stammer fra rails snarere end fra logik eller software.
Fremtidige retninger for PMIC'er
Højere effektæthed og lavere kernespændinger efterlader PMIC'er med strammere elektrisk headroom og mindre tolerance for forsinkelse. Da forsyningslinjer sidder tættere på et digitalt last minimum driftspunkt, kan selv moderat droop vise sig som bløde fejl, nulstillinger eller ydelsesdæmpning, der føles "mystisk" under systemopstart. Dette flytter gradvist designopmærksomheden væk fra, hvor præcist en forsyning ser ud i steady state, og mod hvordan den opfører sig under værste tilfælde, hurtige belastningsbegivenheder.
Hold har ofte en ubehagelig virkelighed: en loop der ser rolig ud på bænken kan stadig opføre sig dårligt i produktet, når reelle arbejdsbelastninger skaber skarpe belastningstrin, lokaliserede hot spots og ujævn fase strømdeling. Et mere modstandsdygtigt mønster er at behandle loop design, valgmuligheder for kraftstadier og PDN impedans som et enkelt koblet system, og derefter verificere adfærden ved hjælp af repræsentative arbejdsbelastningssignaturer i stedet for rene, idealiserede pulser.
Hurtigere transienter trækker naturligt design hen imod strammere loops, men strammere loops gør også design mere udsat for parasitisk induktans, tolerancesammenfald og måle støj, der er nemt at undervurdere i starten. I mange programmer kommer forskellen mellem stabil og feltstabil fra forbedret small-signal modellering, troværdig strøm sensing og kompensation, der er justeret med bevidsthed om det reelle layout.
Øgning af skiftefrekvens kan hjælpe, men det oversætter ikke automatisk til bedre transient adfærd, hvis sensing stien og PCB geometri ikke kan understøtte den ekstra båndbredde. Når det mismatch sker, bliver loop forstærkning brugt til at forstærke støj, hvilket kan overflade som rystende skift, hørbare artefakter i visse driftsformer, eller EMI toppe, der kun vises efter mekanisk integration.
Moderne compute og tilkoblingsblokke genererer efterspørgsel, der er bursty og kompositorisk, så transient validierung spejler i stigende grad, hvad software og radioer faktisk gør, snarere end hvad en belastningsboks kan tilnærme med et enkelt trin.
Mange hold konvergerer på et workflow, der kombinerer:
• Labor belastningstrin
• Platform telemetri logfiler
• Iterative opdateringer til kompensations- og afkoblingsvalg.
Denne tilgang har tendens til at reducere sene overraskelser, især når termiske grænser langsomt omformer elektrisk adfærd og flytter marginer over tid.
Presset for at reducere størrelse, mens der forbedres ydeevne, strækker integrationen ind i pakken og den omgivende struktur, ikke kun chippet. Avanceret pakning og indlejrede passive komponenter kan forkorte høje-di/dt loops, reducere parasitikker og stramme transient respons på måder, der føles umiddelbart målbare under debug. Integrerede magnetiske komponenter kan yderligere øge effektæthed, men fordelene er ofte begrænset af termiske veje, mekaniske begrænsninger og hvordan koblingen ændres, når designet er inde i sin reelle indkapsling.
I deployerede produkter kommer de mest holdbare gevinster fra integration ofte fra at reducere følsomhed over for byggevariation og stabilisere præstation på tværs af produktion spredning, snarere end blot at skære ned på materialeomkostningerne.
Valg af pakke afspejler i stigende grad elektriske og termiske resultater, herunder lavere loop induktans, forbedret varmefordeling og mere forudsigelig impedans kontrol. En almindelig erfaring er, at to boards med samme skematisk kan divergere skarpt i adfærd, når det ene design bevarer en kompakt strømloop, og det andet spreder kraftvejen over PCB'en.
Når systemintegration øges, prioriteres layout planlægning ofte tidligere i udviklingen, fordi senere komponentændringer ikke altid kan rette op på problemer forårsaget af dårlig geometri eller PCB routing.
Integrerede magnetiske komponenter kan øge effektiviteten ved højere frekvens og reducere z-højde, hvilket er attraktivt i tæt pakkede produkter. Samtidig kan de introducere nye koblingsveje og skabe termiske hot spots, der er svære at opdage indtil sene prototyper. Design der forløber glat behandler normalt induktoren og pakken som et kombineret EMI-og-termisk co-design emne, inklusive placeringsbeslutninger nær antenner, højhastighedslinks og følsomme sensorer.
EMI praksis er på vej væk fra rent statiske afbødninger og mod kontrolstrategier, der forudser driftsforhold. Teknikker som spredt-spektrum modulation, smartere gate driving og rigere on-chip sensing kan reducere toppe, men de kræver også koordinering for at undgå blot at handle spidsudledning mod bredbåndstøj eller radiointerferens.
Mange hold har set sekvensen folde sig ud: tidlige EMI checks bestås, så fejler senere bygge, når flere regulatorer skifter i korrelerede mønstre, når en ny firmware tidsplan ændrer arbejdsbelastnings tidspunkter, eller når kabler og skærme skifter tilbageveje. Disse oplevelser skubber EMI-tænkningen op til platformniveauet i stedet for at behandle hver regulator som en isoleret boks.
Efterhånden som skiftedefekter bliver hurtigere, påvirker dv/dt-kontrol stadig mere både emissioner og langtidsstress. Gate-drivere tilføjer mere programmerbarhed, og beskyttelseslogik bliver mere kontekstbevidst, hvilket kan gøre tuning til at føles mere som systemteknik end komponentvalg.
En praktisk vane, der sparer tid, er at justere kantfrekvenser ved hjælp af målinger taget i den endelige mekaniske konfiguration, fordi afskærmning, kabler og jordstrukturer ofte ændrer EMI-resultatet på måder, som en bare kort ikke afslører.
Forbedret on-chip-sensing muliggør adaptive adfærd såsom at ændre skiftadfærd, når emissioner nærmer sig en grænse, eller når driftsmode ændres. Over tid skubber dette PMIC'er væk fra fastfunktionsadfærd og mod styrede subsystemer, der kontinuerligt forhandler ydeevne, støj og termiske forhold baseret på feedback fremfor antagelser.
Batteridrevne systemer fortsætter med at jagte ultra-lav hvilestrøm og god effektivitet ved let belastning ved hjælp af teknikker som PFM/burst-drift, diodemulering og automatisk modvalg. Den følelsesmæssige spænding, som mange teams genkender, er, at de samme lette belastningsmodi, der ser godt ud på et datark, kan introducere strømstøt, hørbare artefakter eller intermitterende EMI-signaturer, der straks bemærkes, selvom den gennemsnitlige effektivitet ser fremragende ud.
For at reducere tvetydighed definerer teams i stigende grad, hvad acceptabel standby-adfærd betyder i konkrete termer, og vælger derefter mode-strategi for at matche.
Almindeligt specificerede mål inkluderer:
• Bølgegrænser i søvn/standby
• Væk-latens
• Akustiske/støjbegrænsninger
• EMI-adfærd under periodisk vedligeholdelsesaktivitet.
I praksis fortæller batterilevetid under realistiske driftscykler ofte historien mere pålideligt end topp effektivitetstal, især når driftscyklussen inkluderer søvn, periodisk vågne, radioburst og sensorsampling.
Automatisk modskiftning er attraktivt, men overgange kan skabe korte forstyrrelser, der forsvinder i gennemsnitlige målinger og kun vises som sjældne nulstillinger eller intermitterende støjklaimer. Design, der føles "solide" i felten, har tendens til at bruge ekstra valideringsindsats lige ved grænserne mellem PFM og PWM, herunder vækningssekvensering, sekvenseringsforsinkelser og grænsevilkårsbelastningstrin.
Et gentaget mønster er, at den mest aggressive effektivitetindstilling ikke altid er det mest komfortable produktvalg, når det producerer bølger, der varierer med forhold eller støjkobling, der er svær at reproducere. Mange teams ender med at vælge en konfiguration, der opgiver en lille mængde effektivitet til fordel for adfærd, der er gentagelig på tværs af temperatur, varians i produktion og scenarier, hvilket ofte sænker integrationsrisikoen og reducerer supportudskiftning.
Efterhånden som beregningsplatforme skaleres op, læner de sig i stigende grad på præcis telemetri, adaptiv spændingsjustering og beskyttelse, der er koordineret på tværs af mange skinner. Telemetri spiller en praktisk rolle i den daglige ingeniørkunst: den kan forkorte opstart, fremskynde rodårsagsanalyse og reducere fristelsen til at overdesigne "bare for en sikkerheds skyld" ved at afsløre, hvor marginerne faktisk befinder sig.
Telemetri har en tendens til at være vigtigst, når betingelserne ændrer sig hurtigt, ikke når skinnesystemet er stabilt og let at måle. Fremtidige PMIC'er forventes at forbedre samplingadfærd, filtreringsvalg og tidsjustering, så softwarebeslutninger bedre følger virkeligheden.
En nuance, som erfarne teams ofte sætter pris på, er, at flere prøver ikke automatisk er mere nyttige; konsistens, kalibreringsstabilitet over temperatur og klare definitioner af båndbredde og latens bestemmer ofte, om dataene kan handles på med tillid.
Med flere skinner følger et stærkere behov for koordineret beskyttelsesadfærd, så systemet reagerer sammenhængende fremfor skinnemæssigt.
Beskyttelseskoordination spænder ofte over:
• OCP-responsadfærd
• OVP-responsadfærd
• UVP-responsadfærd
• OTP-responsadfærd
• Sekvenseringsafhængigheder
• Fejlgenopretningspolitikker
• Statusdeling på tværs af PMIC'er
Reel systemer fejler ofte ikke, fordi en funktion mangler, men fordi skinner reagerer forskelligt på den samme hændelse, hvilket producerer brownout-kaskader eller genstartsløkker, der er frustrerende at diagnosticere. En koordineret fejlhåndteringsmetode, delt status plus en samlet genopretningsplan, matcher bedre, hvordan platforme forventes at opføre sig under stress.
GaN og SiC adoption vil vokse i områder, hvor switch-frekvens og effektivitet væsentligt ændrer størrelsen eller ydeevnegrænserne. Hurtigere switching kan reducere magnetiske komponenter og skærpe transientresponsen, men det øger også dv/dt-relateret stress, EMI-følsomhed og krav til gate-drevdesign og isolationsstrategi. Begrænsningerne er ikke udelukkende elektriske; de involverer også driftsgrænser på tværs af produktionsvariationer og scenarier for reel forkert brug, som teams er blevet lært at tage alvorligt.
GaN og SiC-løsninger belønner ofte præcise gate-drevkontrol, disciplineret layout og beskyttelsesskemaer, der forhindrer overshoot, ringing og utilsigtet aktivering. En praktisk indsigt, der gentager sig, er, at layoutkvalitet kan dominere enhedsvalg; et veludført layout med en "modest" enhed kan overgå en premium-enhed placeret i en støjende, induktiv sløjfe.
Efterhånden som switchhastighederne stiger, bliver isoleringsvalg og langsigtede pålidelighedslimitter mere fremtrædende i designanmeldelser og kvalifikationsplanlægning. Adoption accelererer normalt, hvor ydeevnegevinster klart berettiger en øget designrigor, mens omkostningsfølsomme eller støjfølsomme produkter ofte bevæger sig mere forsigtigt og kræver klarere beviser for systemniveaufordele.
PMIC'er formes i stigende grad til at opføre sig som politikudøvere, der afgør effektivitet, støj, termiske forhold og pålidelighed i realtid. De arkitekturer, der har tendens til at ældes godt, behandler strøm som en styret ressource: PMIC-telemetri informerer softwarepolitikken, og softwarepolitikken justerer derefter PMIC-driftsformer og rækværksadfærd. Dette udvisker grænsen mellem hardware- og firmwareejerskab på en måde, der kan føles ubehagelig i starten, men som ofte betaler sig ved at reducere margin stacking og forbedre modstandsdygtigheden under reelle arbejdsbelastninger.
Konklusion
Effektiv kredsløbsbeskyttelse afhænger af mere end blot at tilføje en enkelt beskyttende komponent. Pålidelige designs kræver ordentlig koordinering mellem overspændingsafledning, spændingsklamping, strømmbegrænsning, jordforbindelse, layout og fejltiming. Hver beskyttelsesenhed har sine egne styrker og begrænsninger, så valget skal matche den forventede fejlkategori, energiniveau, responshastighed og driftsmiljø. En velplanlagt beskyttelsesstrategi forbedrer sikkerheden, reducerer risikoen for fejl og understøtter langsigtet pålidelighed i reale elektroniske systemer.
Ofte stillede spørgsmål (FAQ)
1. Hvorfor betragtes en PMIC som en systemniveau strømkoordinator frem for blot en spændingsregulator?
En PMIC gør langt mere end blot at konvertere en spænding til en anden. Den styrer, hvordan flere rails genereres, sekventeres, overvåges, distribueres og beskyttes på tværs af hele systemet. I praktiske designs koordinerer PMIC'en processor-rails, hukommelsesforsyninger, RF-sektioner, sensorer og perifere domæner, samtidig med at den også håndterer opstartstiming, fejlgendannelse, termiske begivenheder og power-good signalering. Fordi alt dette interagerer under opstart og drift, bliver PMIC'en ofte en af de vigtigste faktorer, der former systemets pålidelighed og stabilitet.
2. Hvorfor optræder PMIC-relaterede fejl ofte kun under reelle arbejdsbelastninger snarere end under simple laboratorietests?
Bænktests med statiske belastninger reproducerer sjældent den hurtige transientadfærd, der genereres af moderne processorer, RF-transmittere, hukommelsestrafik og sensorudbrud. Under realistiske driftsforhold oplever rails pludselige strømspidser, der afslører svagheder i transientrespons, PCB-parasitikker, kompensationsjustering og output-netværksstabilitet. En PMIC kan synes at være stabil under kontrolleret test, men senere vise droop, overshoot, ringing eller sekventieringsfejl, når reelle arbejdsbelastninger skaber hurtigt skiftende elektrisk efterspørgsel.
3. Hvorfor betragtes strømsekvensering som en systemniveau kontrakt i stedet for en simpel opstartsfunktion?
Mange digitale systemer kræver specifikke tidsforhold mellem kernerails, hukommelsesrails, I/O-forsyninger, reset-signaler og altid-tændte domæner. Hvis rails stiger i forkert rækkefølge eller med forkert timing, kan processorer, SRAM-retentionsblokke og højhastighedsgrænseflader komme ind i udefinerede driftsformer. Disse problemer skaber ofte intermitterende opstartsfejl, der kun optræder under temperatur ekstremiteter, brownouts eller batteri-hot-plug forhold. Korrekt sekvensering bliver derfor en koordineret aftale mellem hardware-, firmware- og siliciumkrav frem for en bekvemmelighedsfunktion.
4. Hvorfor kan PMIC transientrespons stille begrænse den reelle ydeevne af CPU'er og GPU'er?
Moderne processorer genererer pludselige strømtrinvise under boost-drift, AI-arbejdsbelastninger, gamingudbrud og radioaktivitet. Hvis PMIC'en ikke kan opretholde en stabil spænding under disse hændelser, kan firmware reducere boostvarigheden, sænke klokfrekvenser eller udvide timingmargener for at forhindre nedbrud. I mange produkter begrænser strømdistributionsbegrænsninger stille kapaciteten af vedvarende ydeevne, selvom processoren i sig selv synes at være kapabel på papir. Stabil transiente respons har ofte mere indflydelse på anvendelig systemydelse end topniveau effektivitetsspecifikationer alene.
5. Hvorfor skaber ripple og skifte støj fra PMIC'er problemer langt ud over selve strøundersystemet?
Skiftende harmoniske og bredbåndsstøj kan kobles ind i RF-kredsløb, ADC-referencer, PLL'er, SERDES-forbindelser og følsomme analoge veje gennem delt jordimpedans og PCB-parasitik. Selv relativt små ripple-niveauer kan reducere ADC-nøjagtighed, øge fase støj, indsnævre timingmargin eller forringe pålideligheden af højhastighedskommunikation. En skinne, der synes elektrisk acceptabel i isolation, kan skabe alvorlige signalintegritetsproblemer, når den integreres i tætte mixed-signal-systemer.
6. Hvorfor definerer PMIC-termiske begrænsninger ofte den maksimale vedvarende computerydelse?
Efterhånden som PMIC-temperaturen stiger, falder effektiviteten, og termiske beskyttelsesmekanismer kan begynde at reducere tilgængelig strøm eller udløse foldback-adfærd. I kompakte systemer kan lokaliserede hotspots nær processorer, hukommelse eller RF-sektioner tvinge PMIC'en til termisk nedgradering længe før de teoretiske elektriske grænser er nået. På grund af dette afhænger bæredygtig systemydelse ofte lige så meget af termisk layout, kobberspredning og pakkevalg som af regulator-specifikationerne selv.
7. Hvorfor kombinerer ingeniører ofte buck-omformere med LDO-regulatorer i følsomme design?
Buck-omformere giver effektiv spændingsreduktion for højstrømslinjer, men introducerer skiftende ripple og EMI. LDO'er genererer en meget renere outputspænding med lavere støj, men dissiperer mere varme, når de sænker større spændinger. En almindelig kompromis anvender en buck-omformer til effektivt at generere en mellemlinje, efterfulgt af en LDO for at rense den endelige følsomme analoge eller RF-strømforsyning. Denne kombination balancerer effektivitet, termisk styring og støjreduktion mere effektivt end at stole på hverken topologi alene.
8. Hvorfor betragtes PMIC-fejlresponspolitikker som en del af den overordnede produktopplevelse?
Fejladfærd bestemmer, om produktet slukker rent, går ind i en genstartsløkke, dæmper ydeevnen graciøst eller bliver ustabil under unormale forhold. Overstrøm beskyttelse, termisk nedlukning, undervoltageshåndtering og genopretningstiming påvirker direkte, hvordan man oplever batterifejl, kabelproblemer eller overbelastningshændelser. Velformede PMIC-politikker isolerer fejl forudsigeligt og genopretter på kontrollerede måder, hvilket reducerer servicekompleksitet og forhindrer, at mindre problemer eskalerer til systemomspændende fejl.
9. Hvorfor er moderne PMIC'er i stigende grad afhængige af telemetri og programmerbare strømpolitikker?
Moderne systemer ændrer dynamisk arbejdsbelastning, termisk tilstand, radioaktivitet og opladningsadfærd i realtid. PMIC-telemetri giver firmware mulighed for kontinuerligt at overvåge skinneforhold, strømforbrug, temperatur og fejlbegivenheder. Disse data muliggør adaptiv spændingsskala, termisk styring, intelligent dæmpning og koordinerede beskyttelsesbeslutninger. Programmérbare strømsystemer introducerer dog også ny valideringskompleksitet, fordi forkert firmwarekonfiguration kan skabe fejl, der ikke eksisterer i faste analoge design.
10. Hvorfor bevæger fremtidige PMIC-designs sig mod "strømorkestrering" i stedet for simpel strømkonvertering?
Fremtidige PMIC'er forventes i stigende grad at koordinere effektivitet, termiske forhold, EMI-adfærd, beskyttelse, arbejdsbelastningsskala, opladningspolitikker og systemtelemetri samtidig. Hurtigere skifteteknologier, strammere spændingsmargener og meget dynamiske arbejdsbelastninger kræver, at PMIC'en kontinuerligt tilpasser sin adfærd baseret på reelle driftsforhold snarere end statiske antagelser. Denne udvikling forvandler PMIC'en til et aktivt styringsundersystem, der arbejder tæt sammen med firmware og systemsoftware for at opretholde stabil, effektiv og forudsigelig platformdrift under ændrede forhold.
Relateret blog
-
Hvor mange nuller på en million, milliarder, billioner?
![Hvor mange nuller på en million, milliarder, billioner?]()
2024-07-29
Million repræsenterer 106, en let forståelig figur sammenlignet med hverdagens varer eller årlige lønninger. Milliarder, svarende til 109, begynde... -
IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout
![IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout]()
2024-08-28
IRLZ44N er en bredt brugt N-kanals magt MOSFET.Det er kendt for sine fremragende switching -kapaciteter, det er meget egnet til adskillige anvendelser... -
Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?
![Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?]()
2024-10-06
Problemer med opladning af mobiltelefonbatteri er almindelige, men kan styres effektivt.Temperaturen spiller en stor rolle i batterieffektiviteten, da... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024-07-04
BC547 -transistoren bruges ofte i en række elektroniske applikationer, der spænder fra grundlæggende signalforstærkere til komplekse oscillatorkre... -
Omfattende guide til SCR (siliciumstyret ensretter)
![Omfattende guide til SCR (siliciumstyret ensretter)]()
2024-04-22
Siliciumkontrollerede ensretter (SCR) eller tyristorer spiller en central rolle inden for effektelektronik -teknologi på grund af deres ydeevne og p... -
LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger
![LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger]()
2024-07-15
LR621 og SR621SW -knapbatterier er udbredt i kompakte elektroniske enheder som ure, små legetøj, regnemaskiner og fjerntaster.Flere producenter prod... -
Grundlæggende om op-amp-kredsløb
![Grundlæggende om op-amp-kredsløb]()
2023-12-28
I den indviklede verden af elektronik fører en rejse ind i dens mysterier, der altid er til et kalejdoskop af kredsløbskomponenter, både udsøgte o... -
En komplet guide til multiplexere og deres rolle i digitale systemer
![En komplet guide til multiplexere og deres rolle i digitale systemer]()
2025-09-20
Multiplexere er komponenter i digitale systemer, designet til at kanalisere flere indgangssignaler til en enkelt outputlinie ved hjælp af binære log... -
Sammenligning af NMOS- og PMOS -forskelle og applikationer
![Sammenligning af NMOS- og PMOS -forskelle og applikationer]()
2024-11-15
At forstå forskellene mellem NMOS og PMOS -transistorer er vigtige for at designe effektive kredsløb.NMOS (N-type metaloxid-halvleder) og PMOS (P-ty... -
CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide
![CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide]()
2025-09-15
Knapbatterier som CR2450 og CR2032 strøm mange hverdagens elektronik, fra ure og fjernbetjeninger til medicinske og industrielle enheder.Selvom de er...










Hot Dele
- SY89829UHY
- MTMC8E280L
- GRM0335C1H3R9BA01J
- TIP36C
- S29GL128P11TFIV20
- AD8642ARZ-REEL7
- F950J107MQAAQ2
- C0603JB1E223K030BB
- LT8301IS5#TRPBF
- TLE5230GS
- UPD179324GB-522-8ET
- LB1848M-TE-R
- C3216X8R2A683M115AA
- ACPM-7313-TR1
- MT29F256G08CBCBBJ4-37:B
- MN101CP52ABL
- LT1257IS8
- DS1340U-3+T
- CY2309SI-1T
- GCM1885G1H390JA16D
- GRM1555C1E5R5DA01D
- CC0402ZRY5V7BB334
- IS24C32C-2ZLI-TR
- AD5541AARMZ
- IS43R16320D-6TLI
- LM2574MX-3.3
- IDT74LVCH16601APF
- GRM033R61C222KA88D
- MIC68400YML
- CGA1A2X7R1C102K030BA
- LC15007-TBM-EV
- 2FI300S-140
- TMP86FS23UG-7AB1
- IP-B50-CW-TR1
- PM8379-BI
- V24C48C100BL2
- MAX7414EUA+T
- T491D106K035AT70277280
- MB95F418KPMC-G-SNE2
- VI-J72-EY
- VE-J3Z-MZ
- MAX3869EMAC+
- TPS650832ZCGT
- MAX3816ACUE
- PSB21525H
- S29GL032A90FFIR23
- LA4585M-TLM
- 51296-5494
- 104X125DA089
- TJA1101BHN/0Z