- Dansk
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Sådan vælger du en shuntmodstand for præcis strømføling
Katalog

Vælg en shuntmodstands værdi
Valg af shuntmodstands værdi sætter tonen for, hvordan strømmeasuresløjfen opfører sig i det virkelige produkt, ikke kun i et regneark. Et valg berører tre ting på samme tid:
• den fuldskala følespænding, du kan arbejde med
• den varme, som modstanden vil skabe
• det ekstra spændingsfald, som lasten vil føle.
I praksis kommer det ofte ned til, hvor komfortabelt du ønsker, at signalmarginen skal være i forhold til, hvor meget tab og overhead du er villig til at leve med.
Mange teams føler tiltrækningen mod så lille som muligt på R for effektivitet; den instinkt er forståelig. Problemet er, at lav shuntspænding ofte får små, kedelige ikke-ideelheder til at blive lange fejlretning sessioner.
Start med at vælge en shuntspænding ved maksimal strøm, som din forstærker og ADC kan fange med råderum over tolerance, temperatur og støj. Et bredt anvendt fuldskala vindue ligger omkring:
• 50–100 mV
mens højere-effekt eller stram-hovedrum design ofte ligger tættere på:
• 10–30 mV
for at reducere fordeling og beskytte belastnings spænding.
Hvad der normalt afgør, om et mål føles "komfortabelt" senere, er ikke tallet i sig selv, men hvor langt det sidder over de fejl, du faktisk vil se på bænken.
En shuntspænding, der ser fin ud i en nominelt beregning, kan føles ubehageligt lille, efter at værst-sags effekter dukker op:
• offset
• drift
• termiske gradienter
• kvantisering
• interferens
Hvis du nogensinde har set en nul-strømaflæsning vandre under en termisk skanning, er den følelsesmæssige buet kendt:
• selvtillid ved stuetemperatur
• så krybende tvivl
• så et sene-aftens forsøg på at lappe det i firmware.
Indgangsoffset og drift kan forbruge en overraskende brøkdel af et lille shunt signal. Når designet hælder for hårdt mod meget lav VSHUNT, ender teams ofte med at bemærke, at no-load værdien nægter at forblive nær nul over temperatur, og de presses mod:
• flere kalibreringstrin
• mere kompensationslogik
• eller begge dele.
Kobber-til-legeovergange kan generere mikrovolt-niveau termoelektriske spændinger i nærvær af temperaturgradienter. Det er let at afvise dette som for lille til at betyde noget, indtil shunten sidder nær:
• en varm induktor
• en MOSFET varmefordeler
• en luftstrømsgrænse, hvor gradienter opstår rutinemæssigt.
Hvis ADC'en (inklusive dens støj) kun producerer et lille antal effektive tællinger over driftsområdet, vil output se rystet ud, og kontrolsløjfer kan begynde at opføre sig følsomt ved let belastning. Et design, der opfører sig høfligt ved nominelt strøm, kan stadig vise kvantiseringsdrevet wobble, når signalet mindskes.
Små shuntspændinger er lettere at forurense via:
• kobling fra vekselstrømsnoden
• jordbounc
• magnetisk indsamling
• layoutrelaterede parasiter.
Når vekslenstrømstrin sidder tæt på, har layout- og filtreringsarbejdet tendens til at vokse hurtigt, mens VSHUNT reduceres.
En praktisk tilgang er at sætte fuld skala VSHUNT, så den forbliver komfortabelt over den samlede værste offset og støj ved det målebåndbredde, du rent faktisk interesserer dig for. Når signalet er for lille, bruger teams ofte dage på at jage:
• layoutjusteringer
• filtreringseksperimenter
der aldrig rigtig føles helt tilfredsstillende.
Når en fuld-skala shunt-spændingsmål er sat, beregn den første modstand direkte:
Eksempel (50 mV ved 5 A):
R = 0.05 / 5 = 0.01 Ω
Behandl dette som et startanker. Efter dette punkt fås værdien normalt skubbet af:
• termisk adfærd
• headroom-grænser
• pakke tilgængelighed
• hvad prototypen lærer dig.
Efter valg af R, beregn shuntdissipation ved maksimal strøm:
Eksempel:
PSHUNT = 52 × 0.01
PSHUNT = 25 × 0.01
PSHUNT = 0.25 W
Det hjælper at tænke på PSHUNT som en input til termisk design snarere end en hurtig datasheet-tjekboks. Selv når modstandens effektvurdering ser generøs ud, kan reelle samlinger køre varmere på grund af:
• begrænset kobberareal
• varme fra nærliggende komponenter
• indkapslingsbegrænsninger
• svag luftstrøm.
Under opstart er det temmelig almindeligt at se aflæsninger drive efter et par minutter, mens shunten og det omgivende kobber varmes op, hvilket skifter modstand og trækker den målte strøm med sig, en oplevelse der kan være mere irriterende end det lyder, når du forsøger at løse et kontrolsløjfestabilitetsproblem.
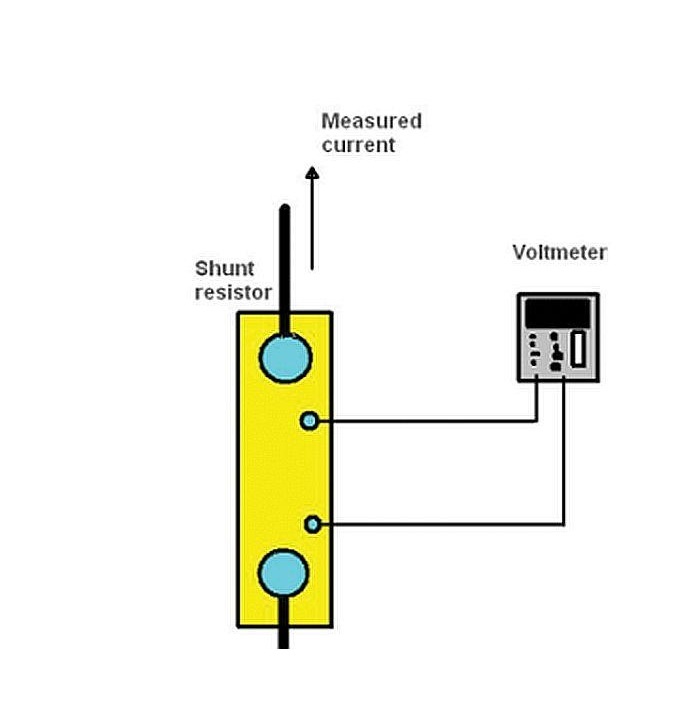
For strømfølerens nøjagtighed vises shuntens tolerance og temperaturkoefficient for modstand (TCR) ofte direkte i fejlbudgettet, lige ved siden af:
• forstærkerbegrænsninger
• ADC-begrænsninger.
En 1% shunt starter dig med omkring 1% forstærkningsfejl før:
• forstærker-offset
• ADC-forstærkningsfejl
• reference-drift
kommer ind i billedet. Hvis strammere nøjagtighed er målet, inkluderer typiske veje:
• bruge en shunt med strammere tolerance
• kalibrering i produktionen
• kombinere begge.
Selvvarmning hæver shunten over omgivelserne, og modstanden flytter sig med denne temperaturstigning. Ved kontinuerlig drift med høj strøm kan denne drift dominere det, du ser i felten. Når temperaturstigningen er usikker, er det ofte mindre stressende at antage en større stigning end den ideelle model forudser og derefter bekræfte med tidlige hardwaremålinger (inklusive steady-state soak).
At øge VSHUNT forbedrer generelt målemarginen ved:
• at lette offset/støjpres på frontenden
• at forbedre signal-til-støj-forholdet
mens:
• at reducere effektivitet
• at stjæle belastningsspænding.
At reducere VSHUNT gør det modsatte og har tendens til at lægge mere byrde på:
• den analoge frontende
• layoutdisciplin
• digital filtrering.
| Faktor |
Højere VSHUNT |
Lavere VSHUNT |
| Signalmargin |
Bedre |
Lavere |
| Effektivitet |
Lavere |
Højere |
| Spændingsfald |
Højere |
Lavere |
| ADC-krav |
Mindre krævende |
Mere krævende |
| Støjsensitivitet |
Lavere |
Højere |
| Effektdissipation |
Højere |
Lavere |
Et mønster, der forekommer i designs, der føles rolige at debugge, er at undgå den absolutte minimum V_SHUNT, medmindre effektivitet dominerer systemmålene. At bruge lidt headroom til målemargin betaler sig ofte tilbage som:
• færre falske beskyttelsesture
• mere stabil kontroladfærd
• mindre tid brugt på at undre sig over, om en mærkelig aflæsning er fysik eller en layoutartefakt.
Når R falder ind i milliohm-området, begynder utilsigtet seriemodstand i:
• spor
• via
• stikforbindelser
• loddefuger
at konkurrere med shunten selv. På dette tidspunkt kan en ekstra 1–5 mΩ fra ruter og interconnect repræsentere en stor del af den tilsigtede værdi, og den målte strøm kan variere med:
• samlingsvariation
• stikforbindelsesældning
• rework.
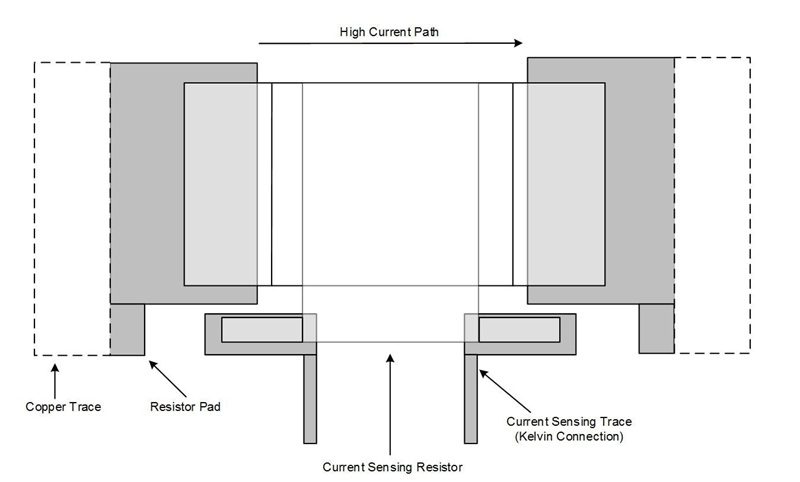
For lavværdi shunter forhindrer fire-terminal forbindelser med omhyggelig rute, at belastningsstrøms kobberfald fejltolkes som shuntspænding. Uden Kelvin-sensning har fejlen tendens til at være strømafhængig og frustrerende inkonsekvent på tværs af builds.
Hvis målet inkluderer hurtig transientfangst, kan kraftig filtrering skjule de hændelser, du forsøger at måle; hvis filtreringen er for let, kan skiftende ripple dominere aflæsningen. Valget af modstand interagerer med filtreringen, fordi det sætter signalamplitude i forhold til:
• ripple
• pickup
• ADC støj.
En struktureret følsomhedskontrol kan levere meget af det, som folk håber på, at simulering vil give, med færre skjulte antagelser og mere handlingsdygtige tal.
For hver kandidat R, beregn:
• VSHUNT ved IMAX
• PSHUNT ved IMAX
• estimeret temperaturstigning (pakke + kobberområde + luftstrømsantagelser)
• forventede fejltermer (offset, drift, ADC kvantisering og støj).
En pragmatisk tilgang er at vælge den mindste modstand, der stadig giver en stabil aflæsning på tværs af temperatur og driftsstøjsforhold, herunder let belastningsadfærd. Dette placerer dig ofte i en position, der balancerer effektivitet med måleusikkerhed, og det reducerer risikoen for en sen overraskelse, hvor nøjagtigheden ser fin ud, når den er kold på bænken, men falder efter opvarmning eller når enheden er tætsluttet i sit hus.
Energitab og termisk design
Estimér elektriske tab i reelle driftscenarier
En shuntmodstand ender med at konvertere elektrisk energi til varme på en meget forudsigelig måde, og den forudsigelighed er betryggende, indtil de reelle driftsformer begynder at lægge sig ovenpå hinanden. Begynd med basisrelationen: P = I²R.
Eksempel på basislinje: 5 A gennem 0,01 Ω → P = 25 × 0,01 = 0,25 W.
De 0,25 W er et startreference for diskussion, ikke et stoppunkt, fordi temperaturstigning og langsigtet modstandsbevægelse normalt er det, der udløser de ubehagelige overraskelser senere i validering.
Brug den højeste kontinuerlige strøm, som produktet realistisk kan holde, og udvid den derefter for hverdagens realiteter, som ingeniører nogle gange ønsker var mindre: tolerance, kalibreringsoffsets, kontrolsløjfe-fejl og variations i forsyning.
Vurder også længerevarende højstrømsdriftsformer, fordi gentagne strømbelastninger, der varer flere sekunder, kan bidrage til opvarmning på en måde, der ligner kontinuerlig drift snarere end en kort transient hændelse.
I mange konstruktioner er den hårde kombination ikke et enkelt punkt i databladet; det er høj belastning plus varm husluft plus reduceret luftstrøm plus nærliggende varmekilder.
For pulseret, klippet, tovejs eller regenerativ strøm, beregn opvarmning ud fra RMS-strøm: P = IRMS²R.
Spidsstrøm kan se meget høj ud på måle plots, men langsigtet opvarmning bestemmes hovedsageligt af RMS-strøm (IRMS) over tid.
Et gentageligt fejlmønster fremkommer, når valideringen fokuserer på spidsgrænser, mens en høj duty cycle stille producerer næsten kontinuerlig opvarmning.
Brug den værste modstandsværdi, når du estimerer den øvre grænse for effekt. Start med tolerance, og medtag derefter modstandens skridt drevet af shuntens TCR, når dens kropstemperatur stiger.
Selv når effekten ligger under navnepladevurderingen, kan selvopvarmning stadig forvrænge målingen gennem: (a) modstandsdrift, og (b) termiske gradienter, der lækker ind i sensor routing og terminationer.
En konservativ antagelse, der ofte sparer tid, er, at shuntens krop kører varmere end en nærliggende bordssensor rapporterer, især når shunten sidder tæt på andre varme komponenter.
Oversæt Watt til temperaturstigning og materialestress
Et effektantal i sig selv fortæller kun en del af historien; den samme dissipation kan være kedelig på et bredt kobberareal og problematisk i et tæt layout inden i en tætsluttet boks.
Det praktiske spørgsmål bliver: hvilken temperatur når shunt-elementet og terminationerne ved høje omgivelser, svag luftstrøm og nærliggende varmekilder, og hvor gentageligt er det resultat på tværs af enheder?
Datablad angiver almindeligvis en nominelt effekt ved en referenceomgivelse (ofte 70°C) og reducerer derefter den tilladte effekt over dette punkt.
Tjek hvor den faktiske kapslings "omgivelse" lander under drift, fordi kapselens luft rutinemæssigt stiger godt over stuetemperatur og kan variere dramatisk med placering.
Nærliggende varmebidrag, der skal tages hensyn til, inkluderer: batterier; spoler; power MOSFETs; ensrettere; varme regulatorer.
For overflademonterede shunter bærer PCB-kobber ofte det meste af varmen væk. Temperaturstigning kan svinge betydeligt med kobberområde, kobbertykkelse, planbinding og termiske via-densitet.
Sene routingændringer, der skærer kobber for bekvemmelighed, har en tilbøjelighed til at producere hot spots og drift, som ingen håbede at skulle bruge tid på.
En arbejdsproces, der ofte føles mere rolig i opstart, er at reservere generøst kobber tidligt og kun afslappe det, når målingerne viser, at den termiske adfærd forbliver velforholdt.
At operere under et vurderet effekt niveau undgår øjeblikkelig skade, men det lover ikke stabil sensing. Mange produkter nedbrydes først blidt: modstanden kryber opad, kalibreringen skifter, og beskyttelsestærsklerne vandrer.
Fra et pålidelighedsperspektiv går valg af shunt ofte mere glat, når det rammes ind i præcisionsbevaring og driftadfærd, hvor wattage behandles som en input snarere end hele beslutningen. Denne ramme reducerer frustration over et design, der klarer en hurtig funktionstest, men som senere kæmper i soak, gentagelsestest eller feltaldring.
Definer headroom med et klart temperatur- og driftmål
En almindelig tommelfingerregel er 2× kontinuerlig effekt headroom, men en mere defensibel tilgang knytter headroom til tilladt temperaturstigning og tilladt drift.
Hvis målingen af livslang nøjagtighed er et designmål, vælg shunten, så steady-state temperaturstigning forbliver bescheiden ved maksimal vedvarende belastning, i stedet for at svæve tæt på den stejl del af nedgraderingskurven.
Dette valg reducerer også loddeforbindelsens belastning fra cyklisk opvarmning, som er et af de problemer, der kan føles fint, indtil det pludselig bliver et sent fejlfindingshul.
For overload og korte hændelser, brug energi og termisk cykling tænkning
Korte pulser kan overstige en kontinuerlig vurdering uden øjeblikkelig fejl, men stadig efterlade en permanent modstandsskift.
For motorstart, indløb eller batterifejlstrømme, vurder pulstress ved hjælp af energi: E = ∫ I²R dt.
Når datablad giver pulsoverbelastningsdiagrammer, brug dem med den faktiske pulsbredden og arbejdscyklussen. Når diagrammer mangler eller er vage, behandl gentagne pulser som et termisk cyklingsscenarie frem for et enkeltstående stunt.
En shunt kan tolerere en enkelt fejl-puls og stadig ældes under gentagen stress. Gentagelse har en tendens til at vise sig som langsom offset drift, intermitterende målinger fra loddefatigue eller subtil pad misfarvning.
Accelererede cyklingstest kører tidligt kan fjerne meget usikkerhed senere, og de betaler ofte tilbage følelsesmæssigt også, med færre det kun fejler nogle gange mysterier under systemvalidering.
Validér med høj-stress termisk testning og ligefremme sundhedstjek
Beregninger indsnævrer kandidater, derefter afslører bænktest hvad indkapslingen, luftstrømmen og layoutet faktisk gør. Kør ved maksimal realistisk belastning, indtil temperaturerne stabiliseres, gentag på tværs af temperatur ekstremiteter, og sammenlign præ- og post-test modstand og måling stabilitet efter nedkøling.
Spor disse sundhedsindikatorer under og efter testkørsler:
• Offset drift, der trender opad ved fast strøm over tid.
• Loddeforbindelser, der kører mærkbart varmere end modstandens legeme eller terminer.
• Board misfarvning eller fluxrester, der mørkner nær pads.
• Intermitterende målinger under tappen, vibration eller termisk cykling.
Fejladfærd, dette workflow sigter mod at undgå
Risikoen accelererer, når shunten nærmer sig sin termiske grænse, og fejlsignaturen falder normalt ind i et par genkendelige kategorier:
• Modstand drift, der direkte omdanner til målefejl.
• Loddefatigue og pad-skader fra termisk cykling, der producerer intermitterende eller støjfyldte målinger.
• Overophedning, der fører til åben/kort hændelser, der deaktiverer beskyttelsesfunktioner eller udløser sekundær skade andetsteds.
En solid afledningsgennemgang afsluttes med demonstreret margen i temperaturstigning og driftadfærd, snarere end at stoppe ved en wattberegning.
Materialevalg og shunt-bygge strategi
Shunt nøjagtighed kan normalt tilbageføres til to brede temaer: hvordan modstanden opfører sig, når delen opvarmes, og hvor godt målearrangementet holder parasitikerne fra at snige sig ind i læsningen. I praksis hjælper det at behandle shunten som mere end et modstandssymbol på et diagram; den opfører sig som en lille termisk struktur med mekaniske grænseflader og kobbergeometri, der stille kan styre tallene.
Dominante fejlkilder: temperaturstigning; forbindelses-/kontaktmodstand; layout-drevet induktans.
Når et designteam føler sig overrasket over en driftende strøm-aflæsning, er det sjældent fordi Ohms lov stoppede med at fungere. Det er oftere fordi den termiske og fysiske implementering tilføjede adfærd, der var let at afvise under diagramgennemgang, og derefter svær at ignorere på bænken.
Materialevalg
Et praktisk valgsmål er en lav temperaturkoefficient for modstand (TCR). Legeringer som manganin og konstantan bruges almindeligvis, fordi deres modstand kun ændres lidt, når temperaturen stiger. Denne adfærd passer til virkeligheden, at en shunt er beregnet til at aflede effekt, nogle gange kontinuerligt, og selv moderate watt kan flytte temperaturen nok til at flytte aflæsningen.
Det hjælper også at planlægge for "selvopvarmning" som en normal driftsmetode frem for en undtagelse. Hvis legeringens TCR er højere, ændrer modstanden sig under en stabil belastning, og den målte strøm kan synes at vandre, selv når den sande strøm er stabil. Den slags langsom drift kan være især irriterende under validering, fordi det ligner et instrumenteringsproblem, indtil den termiske historie bliver åbenbar.
Almindelige fejldiagnoser for langsom strømdrift efter et belastningstrin: ADC-støj; forstærker-offset; kalibreringsfejl.
På et typisk bænksætup er det rutine at følge den viste strøm, der kryber i titusinder af sekunder efter et spring, og derefter falde tilbage, når shunten og dens kobber endelig sætter sig i termisk ligevægt. At se den opførsel for første gang kan føles som et spøgelsesproblem, men det forsvinder ofte, når temperaturstigning og varmeflow betragtes som første klasses designbegrænsninger.
Opvarmning handler ikke kun om den gennemsnitlige temperaturstigning; gradienter på tværs af shuntlegemet og dets ender kan forvrænge gentageligheden. I kompakte kredsboard er den ene ende af shunten måske dumping varme i en stor kobberbredde eller fanger luftstrøm, mens den anden ende forbliver relativt varm. Den ujævne temperaturfordeling kan oversættes til subtile skift i modstand og i de lokale EMF'er og kontaktadfærd, som sensorledningen forsøger at ignorere.
For at få resultaterne til at føles mindre følsomme på tværs af builds, betaler det sig normalt at sprede varmen på en forudsigelig måde:
• Sørg for nok kobber tværsnit til strømførsel og til varmespredning.
• Undgå monteringsdetaljer (afstandsstykker, klemmer, kabinet-ribber), der køler den ene side mere end den anden.
• Hold det termiske miljø omkring begge ender af shunten så symmetrisk som det mekaniske design tillader.
Selv en meget lav-TCR legering har grænser. Hvis driftspunktet driver store temperaturudsving, fordi shunten er undersized, luftstrømmen er inkonsekvent, eller varmeafledning er svag, er noget drift og lang tilpasning efter ændringer i belastningen simpelthen hvad fysikken producerer. At designe så shunten kører "mindre varmt end den kunne" køber ofte mere rolige tal og færre hovedbrud-udredningssessioner.
Konstruktion
At vælge en god legering afslutter sjældent jobbet. Konstruktions- og forbindelsesdetaljer dominerer ofte, fordi shunt-signalet almindeligvis er i millivoltområdet, hvor små parasitter begynder at konkurrere med den målte mængde.
I det millivoltregime kræver det ikke meget, for at ekstra seriemodstand betyder noget: loddepunkter, vias, connector-kontakter og kobber-nedgang kan alle tilføje fald, der ligner ægte shunt-spænding, medmindre sensorerne er arrangeret omhyggeligt. Dette er et af de områder, hvor ingeniører kan føle sig sikre ved at kigge på et diagram og derefter føle sig mindre tilfredse efter samlingen, fordi diagrammet udelader den fysiske strømmars, som PCB'en og stikkene skaber.
En fire-terminal (Kelvin) shunt, eller i det mindste et fodaftryk, der adskiller strøm- og sensforbindelser, producerer generelt mere pålidelige resultater end en to-terminal opsamling. Intentionen er ligetil: mål spændingen over det modstandsdygtige element selv, ikke over samlingerne og kobberet, der bruges til at bære belastningsstrømmen.
Ved høj strøm kan selv brøker af en milliohm i seriemodstand skabe millivolt ekstra fald. Når det ekstra fald sidder i sensing-stien, kan det lande i samme område som det tilsigtede shunt-signal og forvrænge den udledte strøm. Mange design, der ser rigtige ud på papir, ender med at læse højt eller drifte, fordi den fysiske implementering ved et uheld inkluderede skjult modstand inden for det observerede område.
Kelvin-sensing leverer kun det, det lover, når sens-sporene tilsluttes de tilsigtede elektriske grænser. Sensor-pads fungerer bedst, når de opsamler spænding direkte ved kanterne af det modstandsdygtige element, ikke et sted langs højstrømskobber, der også bærer belastningsstrømmen og dens tilknyttede IR-fald.
Layoutvaner, der har tendens til at reducere ubehagelige overraskelser:
• Placer Kelvin-sensstik tæt på grænserne for det modstandsdygtige element.
• Rute sens-sporene som et tæt differentialpar.
• Hold sens-parret væk fra skiftende noder og støjende strømsløjfer.
• Returner sens-parret direkte til forstærkerens indgange uden at dele højstrøms-segmenter.
At behandle sens-parret som et instrumenteringssignal, i stedet for bare et andet net, fører ofte til mere stabile aflæsninger på tværs af produktionsvariation, omskrivninger og stikaldring. Den stabilitet er svær at overvurdere under sent debug, når tidstrykket får hver tvetydig millivolt til at føles personlig.
Dynamiske belastninger: Induktans som den stille ekstra spændingsterm.
Med dynamisk strøm bliver induktans ofte den dominerende kilde til målefejl. Den målte shuntspænding er ikke rent I × Rshunt. Når strømmen ændrer sig hurtigt, tilføjer et induktivt led, Vinductive = L(di/dt), til eller trækker fra den resistive spændingsfald. I hurtigt skiftende kraft elektronik kan det induktive bidrag overstige det resistive bidrag under skiftekantene, hvilket kan få øjeblikkelige målinger til at se forkerte ud, selv når målekredsen fungerer præcist som den er bygget.
En implikation, der overrasker teamene: en shuntarrangement kan se nøjagtig ud ved jævnstrøm og derefter se unøjagtig ud i et PWM-miljø. I mange tilfælde rapporterer kredsen simpelthen fysikken i strømmens bane, herunder dens parasitiske induktans, snarere end at lave en beregningsfejl.
Lav-induktans shunter reducerer sløjfens areal gennem brede, flade strømveje og symmetrisk geometri. Den konstruktion reducerer parasitisk induktans og sænker størrelsen af di/dt artefakter. I praktiske bygninger flytter nogle få geometriske valg konsekvent nålen mod gentagelighed:
• Symmetrisk strøminput og -udgang omkring det resistive element.
• Korte, direkte strømveje med minimalt sløjfareal.
• Bredde leder tværsnit, der undgår smalle indsnævringer nær shunten.
Når PWM-kantene er hurtige, gør disse fysiske valg ofte mere for måle stabilitet end små ændringer i nominal resistansværdi, og det kan føles kontraintuitivt, indtil første gang et layoutændring løser, hvad der så ud som et analogt front-end problem.
Når (di/dt) er højt, reducerer placeringen af forstærkeren tæt på Kelvin-punkterne opsamlingen og undgår at forstørre det fornemmelse sløjfareal. Stram differentialruter hjælper af samme grund. Filtrering bliver derefter et bevidst valg snarere end en eftertænksomhed, fordi skiftekantene kan alias ind i målebåndbredde og skabe målinger, der ser støjende, springende eller vildledende ud.
Måleobjektiv muligheder (vælg tidligt, fordi det skubber layout og analoge beslutninger i forskellige retninger): gennemsnitsstrøm til effektovervågning, begræns båndbredde så kanten dæmpes, og skærmen stabiliserer sig; top/transient strøm til beskyttelse, hold båndbredde højere, mens du fremhæver lav induktans og omhyggeligt layout for at reducere falske udløsninger.
I dag-til-dag ingeniørvilkår føles designet glattere, når teamet tidligt er enige om, om det ønsker elektrisk hurtige strømoplysninger eller energisk nøjagtige strømoplysninger. Disse to mål kan begge være gyldige, men de trives sjældent under den samme shuntgeometri, forstærkerbåndbredde og filterstrategi.
Mekaniske og Sikkerhedsfaktorer

Mekanisk udførelse bestemmer, om teoretisk ydeevne holder op, når produktet møder varme, vibration, håndtering og tid. Elektrisk nøjagtighed kan optimeres i skematiske og regneark, men stabilitet i den virkelige verden og sikker adfærd plejer at blive bestemt af mekaniske og termiske realiteter, som nogle gange er lette at undervurdere, indtil en prototype begynder at “opføre sig anderledes” på bænken.
Termisk håndtering og varme-drevet målefejl
Højstrømshunter omdanner små spændingsdropped til varme, og den varme har brug for en gentagelig vej til at sprede sig og forlade systemet. En inkonsistent termisk vej kan forårsage målevariation og drift. Disse effekter bliver ofte mest mærkbare under belastningsændringer, ændringer i kabinettets temperatur og systemets opvarmningsperioder.
En shunt kan se elektrisk sund ud i isolation og stadig drive, når den er indlejret i en underdimensioneret eller besværlig kobberstruktur. I praksis bliver det omgivende kobber en del af shuntens termiske miljø og en del af strømfordelingsnetværket.
Almindelige bidragydere til uventet opvarmning er som regel trivielle, hvilket er grunden til, at de glider igennem anmeldelser: en enkelt indsnævret sektion, en via flaskehals eller en lagovergang, der koncentrerer strømtæthed.
Anbefalede layout taktikker:
• Brede, tykke kobberstrømninger på højstrøms-segmenter
• Korte, direkte strømveje med minimal indsnævring
• Flere vias til lagovergange for at distribuere både strøm og varme
• Føle pickuppunkter placeret for at undgå parasitisk modstand i højstrømskobber
Når kort kommer tilbage fra laboratoriet med mystisk drift, sporer det ofte tilbage til en overset indsnævring, der bliver den sande varmer, som skubber shuntens temperatur lige nok til at bageste målinger under reell belastning.
Hvis luftstrømmen er tilfældig snarere end defineret, kan shuntens temperatur ændre sig med kabinettets orientering, ventilatorens variation eller hvor stramt ledningerne er strakt nær kortet. Den slags variabilitet kan være frustrerende, fordi det skaber kalibreringsadfærd, der føles lunefuld fra et setup til et andet, selv når intet åbenlyst ændrede sig elektrisk.
En lille varmeafleder, en kontrolleret luftstrømkanal eller en bevidst termisk kontaktstrategi kan gøre temperaturprofilen gentagelig. Gentagelighed tendens til at være mere værdifuld end at jagte den lavest mulige temperatur, fordi kalibrering og kontroladfærd drager fordel af konsistens.
Situationer hvor spids temperatur betyder mere end gennemsnittet:
• Motorstyringer med PWM lastdynamik
• Solenoider eller aktuatorpulsering
• Inrush begivenheder og hurtige strømtransienter
• Duty-cycled industrielle belastninger
At designe kun ud fra steady-state termiske tal kan producere intermitterende drift under duty-cycle overgange, hvilket ofte er, når kontrolsløjfer er mest følsomme og når "næsten korrekt" sensing bliver operationelt ubehageligt.
Temperaturgradienter på tværs af forskellige metaller kan skabe mikrovolt-niveau offsets, og disse offsets stopper med at være akademiske, når signalet af interesse kun er titusinder af millivolt. Layoutsymmetri er ikke æstetisk her; det er en målemetode, der reducerer termisk EMF ubalance.
Praktiske symmetri vaner:
• Rute sensetræk som et matchende par med lignende længde og geometri
• Hold kobbermasse og termisk eksponering ensartet på begge sensestier
• Undgå at placere en sensorledning nær lokale varmekilder, mens den anden forbliver i en koldere region
Varme kilder, der almindeligvis skævner den ene side af et sensorpar:
• MOSFET'er
• Induktorer
• Ensretter og dioder
• Højdissipationsregulatorer
Et mønster, der gentagne gange viser sig under debug, er det offset, som ingen kan forklare ofte korrelerer med printplade temperatur stigninger og falder, når sensestierne og den termiske eksponering bliver mere afbalanceret.
Tolerance, Stabilitet, og Spændingsstress
Initial tolerance påvirker udgangspunktet, men langsigtet nøjagtighed formes oftere af, hvordan modstand ændrer sig med temperatur, effekt tæthed og mekaniske begrænsninger, der subtilt ændrer den termiske profil over måneder eller år. Shunten driver sjældent alene; den omgivende struktur og procesdetaljer styrer ofte resultatet.
En stram toleranceskunt kan reducere den initiale gevinstspredning, men systemgevinsten afspejler stadig den fulde signal kæde. Det er almindeligt at se produktionsvariation, der drives mindre af den nominelle shuntværdi og mere af konsistente, små samlingsforskelle, der summerer op.
Systems niveau bidrag til gevinstfejl:
• Forstærkerens indgangs offset og bias strømme
• ADC reference drift og temperaturadfærd
• Modstand tilføjet af sensesti routing og forbindelser
• Kontaktmodstand ved stik eller bus interfaces
• Kobbertykkelses variation og belægningsforskelle
• Loddevolumen og fillet geometri omkring terminationer
Footprint design og sensorindfangnings placering kan justeres for at reducere følsomhed over for loddefilletter og kontaktgeometri. Denne tilgang giver ofte mere forudsigeligt lot-til-lot adfærd end blot at specificere en strammere nominelt shunt tolerancer og håbe, at resten af stakken fungerer ideelt.
Lav TCR begrænser modstandsbevægelser med temperatur, og en lav effektkoefficient reducerer modstandsbevægelser med anvendt effekt tæthed. Den ubehagelige del er, at selvopvarmning er belastningsformet, ikke konstant, så drift kan blive belastningsafhængig, effektivt en stille ikke-linearitet, som kontrolalgoritmer måske ikke forventer.
Forhold, der ofte afslører belastningsafhængig drift:
• Bred dynamisk rækkevidde operation
• Repetitive pulserende belastninger
• Lukkede sløjfer kontrol, der antager lineær strøm feedback
En holdbar strategi er at behandle shunten som termisk aktiv og reducere temperaturstigningen pr. amp ved hjælp af kobber spredning, forudsigelig luftstrøm og disciplineret komponentplacering, snarere end kun at stole på en datablad forbedring, der måske ikke oversættes, når printpladeniveauet termiske kontekst dominerer.
Selv hvis shunt spændingsfaldet er lille, kan elementet og dets terminaler sidde ved høj fælles tilstandspotentiale. Det betyder, at arbejds spændingsbegrænsninger, isolationssystemets adfærd, og printpladeniveau krypens/afstand skal evalueres på systems niveau, ikke udledes fra millivolt målingen.
Designkontroller, der skal køre eksplicit:
• Maksimal arbejds spænding over elementet og pakke isolationssystem
• Kryb og afstand i henhold til den gældende standard og forureningsgrad
• Printplade renhed og rester, der kan reducere effektiv krybning
• Fysisk placering i forhold til kontaminationskilder og ledende affaldsveje
Kontaminationsfaktorer, der har tendens til at overraske teams senere:
• Støvakkumulering i luftstrømveje
• Kondensering under opbevaring eller transport
• Lodderester og ujævn rengøringsdækning
Når lækagefejl fremstår tilfældige i felten, er årsagen ofte en forudsigelig kombination af placering, rester og miljø, som kun bliver åbenlys efter at have korreleret returneringer med detaljer om fremstillingsprocessen.
Holdbarhed under reelle mekaniske belastninger
Shunts anvendes ofte, hvor varme, vibration og gentagne strømcyklusser sameksisterer. Det er klogt at antage, at samlingen vil se fleksion, stød og termisk ekspansionsmisforhold, selvom produktet markedsføres som stationært, fordi transport, installation og service stadig pålægger mekaniske begivenheder.
Afslutningsbehandling og beskyttende belægninger bør matche den forventede atmosfære. Korrosion fejler ikke altid dramatisk; det kan stille og roligt introducere milliohm-niveauændringer, der presser kalibreringen over tid, hvilket kan være dybt irriterende, fordi firmwarefiltrering muligvis gør drift mindre åbenlys uden faktisk at fjerne fejlen.
Miljøer, der accelererer korrosionsmekanismer:
• Industrielle dampe og kemisk eksponering
• Vejsalt og kystnær saltluft
• Høj luftfugtighed og hyppige kondensationscykler
Store shunts kan opføre sig som stive ankre. Under termisk cykling kan den stivhed belaste loddefuger, især nær kantene på printpladen, skrueblokker eller områder, der bøjer under samling. Fejl opstår ofte, hvor masse og vibration mødes, ikke nødvendigvis hvor strømtætheden er højest.
Mekaniske pålidelighedsforanstaltninger:
• Tilføj mekanisk støtte, hvor det passer ind i samlingskonceptet
• Følg det anbefalede landmønster for at kontrollere fugtighedsområdet og fillets formen
• Undgå at spænde over områder af PCB, der bøjer under installation eller stramning
• Hold høj-masse dele væk fra kendte fleksionspunkter, når der er layoutfrihed
Feltreturneringer understøtter ofte en simpel realitet: revner har tendens til at dannes, hvor stress koncentreres, og stress koncentreres, hvor stivheden ændres brat.
For hårde miljøer drager komponentvalg fordel af cykling og vibrationspræstationsdata, der afspejler reelle kvalifikationsmetoder. Foranstaltninger som staking eller underfyldning kan hjælpe i nogle opbygninger, men de kan også skabe nye termiske eller stressrelaterede problemer, hvis de anvendes uden at bekræfte bivirkninger.
Tilgange, der ofte vurderes sammen:
• Komponenter med validerede termiske cykling- og vibrationsdata
• Underfyld eller staking efter bekræftelse af, at varme ikke er fanget
• Mekaniske begrænsninger, der undgår at skabe nye stresspunkter
Testplanlægningsdetaljer, der reducerer falsk selvtillid:
• Temperaturcykling med strømforsyning, ikke kun uden strøm
• Måling af drift under arbejde-cyklusovergange
• Inspektion for loddekrype og mikrorevner efter cykling
Uden strøm termiske tests kan se rene ud, mens de mangler strømskoefficientrelateret drift og belastningsformede mekaniske effekter, der kun fremkommer, når strømmen faktisk flyder.
Sikkerhed, overholdelse og fejlsikret adfærd
Sikkerhed formes af, hvad systemet gør, når noget går galt, ikke kun af komponentens trykte vurdering. En strømsensor kæde, der opfører sig forudsigeligt under fejlsituationer, har tendens til at producere mere stille resultater i felten og klarere diagnostik under service.
Dele med anerkendte sikkerhedscertificeringer kan reducere overholdelsesusikkerhed og forbedre sporbarheden. Alligevel er certificering ikke en genvej til systemsikring, fordi krybeafstand, afstand og termiske forhold er egenskaber ved det samlede produkt og dets layoutvalg.
Overholdelses- og verificeringspunkter, der forbliver systemejede:
• Krybeafstand og klaring på printpladen
• Termisk stigning i den reelle indkapsling og luftstrømsbetingelse
• Afstand omkring forurenende stoffer og rester
• Fremstillingskontroller, der bevarer antaget renhed og afstand
Antag, at shunten kan fejle åbent, drifte opad eller udvikle intermitterende forbindelser. I en kontrolsløjfe kan en åben shunt misfortolkes som ingen strøm, hvilket kan få systemet til at kræve mere drift og skabe runaway-adfærd.
Fejladfærd, der er værd at planlægge for:
• Åben kredsløb shunt eller løftet afbrydelse
• Gradvis modstand drift, der skævvrider strømmålinger
• Intermitterende kontakt under vibration eller termisk ekspansion
• Sensorledning skade eller ADC indgangs anomalier
Detektions- og afbøjningsmønstre, der almindeligvis anvendes:
• Plausibilitetskontroller sammenligning af beordret vs. målt respons
• ADC mætning overvågning og område sanity checks
• Timeout-baseret fejl-låsning for ustabile målinger
• Defineret de-energize adfærd, når sensing bliver upålidelig
Systemer, der overgår til en forudsigelig de-energized tilstand under sensing-fejl, er generelt lettere at validere og lettere at stole på end systemer, der forsøger at fortsætte med at operere på tvetydige tilbagemeldinger.
Giv testpunkter eller indbyggede diagnostikker, så fejl kan isoleres uden risikabel probing nær høje strøm- eller høj spændingsnoder. Serviceteams har tendens til at bevæge sig hurtigere, når designet tilbyder en klar metode til at bekræfte, om sensor kæden er intakt, og den hastighed reducerer ofte sekundære skader fra gentagne forsøg og fejludbedringer.
Servicervenligt designbestemmelser:
• Tilgængelige testpunkter for sens spænding og referencekontrol
• Indbyggede selvtestkroge eller kalibreringslæsninger, hvor det er muligt
• Klare isolationstrin, der adskiller sensorfejl fra belastningsfejl
• Dokumentation, der forbinder målte noder til forventede værdier under sikre forhold
Mekaniske og sikkerhedsfaktorer er den praktiske vej, hvormed nøjagtighed, stabilitet og sikker adfærd vedvarer over tid. Mere pålidelige strømmåledesign behandler shunten som et termisk-mekanisk element først og en ideel modstand bagefter, og justerer derefter layoutsymmetri, isolationsdisiplin, forureningskontrol og failsafe-logik omkring den virkelige driftskontekst.
Beregnings eksempler
Shunt-baseret strømmåling ser ren ud på papir, og ligningerne skaber sjældent problemer af sig selv. Hvad der ofte overrasker folk senere, er hvor hurtigt en korrekt elektrisk værdi kan se anderledes ud, når temperaturstigning, monteringsstress, copper modstand og connectoradfærd kommer ind i billedet. I det daglige designarbejde er det mest tilfredsstillende shuntvalg som regel det, der forbliver forudsigeligt på tværs af varme, samlingsvariation og lednings parasitær, mens det stadig producerer et signal, som den analoge frontende kan læse uden drama.
Antag en 100 mA fuldskala strøm og en 50 mV mål spænding. Det spændingsniveau føles typisk behageligt, fordi det ligger over almindelige offset og støj niveauer, så systemet ikke bliver tvunget til at lede efter opløsning.
Elektrisk opsætning og beregning:
• Modstand: R = 0.05 / 0.1 = 0.5 Ω
• Fuldskala shuntafledning: P = I² × R = 0.1² × 0.5 = 0.005 W
5 mW ser næsten for lille ud til at bekymre sig om, men det er svært at ignorere, hvor ofte reel hardware ender med at være varmere end det tidlige regneark antog. At vælge en større effektrating (for eksempel 0.25 W) føles ofte konservativt på en god måde: det sænker temperaturstigningen, reducerer modstandsdrift og giver åndedrætsrum, når systemet ikke opfører sig ideelt.
Scenarier, der ofte strækker den milde effekt antagelse: varme kabinetter, nærliggende varmekilder, reduceret konvektion, forlænget fejlstrøm på grund af firmware- eller belastningsproblemer.
På dette strømniveau er selvopvarmning normalt ikke den dominerende fejlterm, og den virkelighed kan være underligt beroligende: shunten kan være fin, mens frontenden stille fastsætter nøjagtighedstaket.
Et 50 mV fuldskala signal er generelt nemt at forstærke, men designkonfidens forbedres, når amplifierens indgangs-offset og drift forbliver godt under millivoltområdet på tværs af temperatur. Det hjælper også, når det output-refererede støj efter forstærkning ikke udvisker de mindste trin, som du bekymrer dig om. En almindelig frustration i evalueringssessioner er at se en omhyggeligt valgt shunt parret med en forstærker, hvis offset drift over temperatur ender med at være den største bidragyder i fejl budgettet.
Selv ved lav strøm kan jordfejl skabe fejl, der er pinligt større end den shunt drop, du havde til hensigt at måle. Tæt, parret rute for sensorlinjerne og en ren reference strategi hjælper med at undgå offsets, der kun vises, når andre subsystemer skifter tilstande.
Typiske layoutpraksisser, der reducerer mystiske aflæsninger: Kelvin sensrouting til shuntelementet, tæt differential routing, kontrollerede returveje, adskillelse fra høje di/dt sløjfer.
Antag 50 A fuldskala og en 75 mV mål spænding. Intentionen her er velkendt: hold energitab rimeligt, mens du stadig leverer et sensor signal, der holder i et støjende miljø.
Elektrisk opsætning og beregning:
• Modstand: R = 0.075 / 50 = 0.0015 Ω
• Fuldskala shuntafledning: P = 50² × 0.0015 = 3.75 W
En del, der er klassificeret til 5 W, kan være et rimeligt startfilter, men etiketten fortæller sjældent hele historien. I reelle opbygninger afhænger temperaturstigning i høj grad af, hvordan shunten er monteret og kølet, og disse detaljer kan dominere udfaldet, selv når den elektriske matematik er fejlfri.
Praktiske påvirkninger, der ofte opvejer katalognummeret: kobberområde og tykkelse, luftstrøm, monteringsgrænseflade, nærhed til varme komponenter, kabinetvarmesink.
Ved 50 A falder spændingen fra stikforbindelser, og kobber kan lande i samme nabolag som 75 mV, hvilket er præcis, hvor måleargumenter begynder. Hvis føleslanger ikke tages direkte fra shunt-elementet (Kelvin-forbindelser), vil målingen inkludere lednings- og kontaktmodstand, som kan ændre sig med connectorens aldring, oxidation og temperatur. Dette er en hyppig årsag til, at to enheder, der så identiske ud på bænken, ender med at være uenige efter installation.
Selvopvarmning flytter modstanden i henhold til shuntens TCR, og den forskydning viser sig som gevinstfejl. Designet har tendens til at føles mere under kontrol, når termisk adfærd behandles som en del af måleoverførselsfunktionen, ikke som en eftertænkt tanke.
Emner, der normalt foldes ind i en realistisk termisk/fejlkontrol: værst tænkelige vedvarende strøm, realistisk fejllængde, varm omgivelse, temperaturløft i kabinet, PCB kobberspredningsmodstand, opvarmning af stikforbindelser.
Højstrøms-transienter kan afsløre induktans og mekanisk ustabilitet på måder, der er svære at gennemsnit i firmware. Elementstilarter med lav induktans (ofte metal-element konstruktioner) reducerer måleartefakter under hurtige strømtrin. Mekanisk stress fortjener også respekt: boltens moment, PCB fleksion og termisk cykling kan skifte modstand med små mængder, der bliver synlige på milliohm-niveauer.
Mekaniske/strukturelle bidrag, som ingeniører ofte ender med at følge: momentvariation, vaskerstak, krybning over tid, termisk udvidelse mismatch, vibration.
Antag et batterisystem med 10 A fuld skala og en målretning på 100 mV følespænding. Beregningerne er enkle, men feltadfærd er ofte ikke, især når opladning og afladning finder sted i varme rum.
Elektrisk opsætning og beregning:
• Modstand: R = 0,1 / 10 = 0,01 Ω
• Fuldskala shunt-dissipation: P = 10² × 0,01 = 1 W
En 2 W (eller højere) komponent reducerer typisk temperaturstigning og forbedrer stabiliteten, hvilket stemmer overens med hvad mange teams lærer efter den første runde feltdata: drift har tendens til at vise sig, når selvopvarmning og kabinettemperatur stakker sammen. Resultater fra bænken ved stuetemperatur kan være virkelig fremragende og stadig ikke kunne forudsige adfærd ved forhøjet omgivelse.
Forhold, der ofte afslører drift: vedholdende opladning/afladning, varme-fordampnings-kabinetter, begrænset luftstrøm, nærliggende strømomformere, der opvarmer kortet.
Højere følespænding forbedrer signal-til-støj-forholdet og letter kravene til forstærkere, men det øger effektabspild og lokal opvarmning. Lavere følespænding reducerer dissipation, men det lægger mere byrde på forstærker-offset, støj og layoutudførelse. Mange robuste designs ender med at favorisere en moderat følespænding og derefter bruge rigtig kræfter på termisk styring, fordi den langsigtede adfærd ofte er mere forudsigelig end at jagte minimalt tab.
Handelsakser, der typisk evalueres sammen: SNR-margin, forstærker-offset/drift headroom, tilladt dissipation, temperaturløft, mekaniske emballagebegrænsninger.
Shuntvalg har tendens til at glide glat, når de elektriske mål og de fysiske realiteter betragtes som ét sammenkoblet problem. Følgende sekvens er enkel nok til at gentage, men detaljeret nok til at fange de problemer, der ofte dukker op sent.
Beregn elektriske mål først:
• Beregn shuntmodstanden ud fra den ønskede følespænding: R = Vsense / IFS
• Beregn dissipation ved hjælp af værst tænkelige strøm: P = IMAX² × R
Når IMAX defineres, hjælper det at inkludere transienter og fejlsituationer, der kan vare længere end den første intuition antyder.
Dele med lav TCR, lav induktans og velbeskreven driftadfærd fører typisk til roligere debugging-cykler. Konstruktion, der understøtter Kelvin-sansning, stabile terminer og gentagelige monteringer betaler som regel sig i enhed-til-enhed konsistens.
Deleegenskaber, der ofte grupperes sammen under udvælgelse: TCR, langsigtet drift-specifikation, pulsbehandlingsnotater, induktans, terminaltype, anbefalet landmønster, Kelvin-kapacitet.
Mål eller model shuntens temperaturstigning i den virkelige samling ved varm omgivelse, ved hjælp af den tilsigtede monteringsmetode og kobbergeometri. Dette trin har tendens til at klarlægge de faktorer, som ingeniører ønsker var mindre: luftstrømsantagelser, varmeopsamling, opvarmning af stikforbindelser og kobberspredningsmodstand.
Et stabilt designperspektiv er, at shunt-sensing er en elektrisk måling, der lever i et termisk og mekanisk system. Designs, der anerkender den kobling, leverer normalt målinger, der forbliver konsistente på tværs af enheder, på tværs af temperatur og over tid.
Konklusion
Nøjagtig strøm måling kræver mere end at vælge en modstand, der opfylder en simpel beregning. Shunt værdi, effekttab, temperaturstigning, tolerance, TCR, forstærkerpræstation, ADC adfærd og PCB layout bidrager alle til det endelige resultat. Ved at balancere signalkraft, effektivitet, termiske grænser og fejlkilder kan designere bygge strømfølelsessystemer, der forbliver stabile, nøjagtige og pålidelige under virkelige driftsforhold.
Ofte stillede spørgsmål [FAQ]
1. Hvorfor skaber valg af en ekstremt lav shunt spænding ofte flere måleudfordringer end forventet?
En meget lav shunt spænding reducerer effekttab og forbedrer effektiviteten, men den gør også målingen mere sårbar over for forstærkeroffset, temperaturdrift, ADC kvantiseringsstøj, termoelektriske spændinger og switching interferens. Efterhånden som signalet bliver mindre, forbruger disse fejlkilder en større procentdel af måleområdet. Hvad der ser effektivt ud på papiret kan i sidste ende kræve yderligere kalibrering, filtrering og layoutoptimering for at opretholde stabile strømaflæsninger på tværs af temperatur- og driftsbetingelser.
2. Hvorfor er valg af shunt modstand fundamentalt et kompromis mellem effektivitet og målesikkerhed?
Øgning af shunt modstand producerer en større følsomhedsspænding, hvilket forbedrer forholdet mellem signal og støj og reducerer presset på forstærkeren og ADC'en. Imidlertid øger det også effekttabet, temperaturstigningen og spændingstabet, som ses af belastningen. At reducere shunt modstanden forbedrer effektiviteten og minimerer opvarmning, men stiller strengere krav til analog nøjagtighed, kvaliteten af PCB-layout og digital filtrering. Succesfulde designs balancerer typisk begge mål i stedet for kun at optimere for ét.
3. Hvorfor kan en strømfølelsescircuit synes at være nøjagtig ved stuetemperatur, men drifte betydeligt efter opvarmning?
Selvvarmen ændrer shunt modstand i henhold til dens temperatur koefficient for modstand (TCR). Efterhånden som strømmen flyder kontinuerligt, varme shunten og den omgivende kobber gradvist op, hvilket får den målte værdi til at skifte, selvom den faktiske strøm forbliver uændret. Yderligere varme fra nærliggende komponenter, temperaturstigning i omslaget og variationer i luftstrøm kan yderligere forstærke denne effekt. Termisk adfærd bliver ofte en væsentlig bidragyder til langsigtet måle nøjagtighed.
4. Hvorfor betragtes Kelvin måling som essentiel for lavmodstands shunt målinger?
Når shunt værdi falder ind i milliohm området, kan modstanden fra PCB spor, viaer, loddeforbindelser og stik blive sammenlignelig med shunten selv. Kelvin måling adskiller den strømførende vej fra den spændingsmålevej, hvilket sikrer, at kun spændingen over det resistive element måles. Uden Kelvin forbindelser kan parasitisk modstand introducere strøm afhængige fejl, der varierer mellem monteringene og forværres over tid på grund af forbindelsesældning eller mekanisk stress.
5. Hvorfor bør beregninger af effekt tab baseres på RMS strøm i stedet for spids strøm i mange applikationer?
Spidsstrøm værdier kan synes alarmerende under switching begivenheder eller opstartstransienter, men langsigtet opvarmning bestemmes primært af RMS strøm. RMS strøm afspejler den gennemsnitlige energi, der leveres til modstanden over tid, og påvirker derfor direkte temperaturstigningen. Designs, der kun fokuserer på spids strøm, kan undervurdere termisk stress, når høj-duty-cycle belastninger skaber nær- kontinuerlige opvarmningsforhold.
Relateret blog
-
Hvor mange nuller på en million, milliarder, billioner?
![Hvor mange nuller på en million, milliarder, billioner?]()
2024-07-29
Million repræsenterer 106, en let forståelig figur sammenlignet med hverdagens varer eller årlige lønninger. Milliarder, svarende til 109, begynde... -
IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout
![IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout]()
2024-08-28
IRLZ44N er en bredt brugt N-kanals magt MOSFET.Det er kendt for sine fremragende switching -kapaciteter, det er meget egnet til adskillige anvendelser... -
Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?
![Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?]()
2024-10-06
Problemer med opladning af mobiltelefonbatteri er almindelige, men kan styres effektivt.Temperaturen spiller en stor rolle i batterieffektiviteten, da... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024-07-04
BC547 -transistoren bruges ofte i en række elektroniske applikationer, der spænder fra grundlæggende signalforstærkere til komplekse oscillatorkre... -
Omfattende guide til SCR (siliciumstyret ensretter)
![Omfattende guide til SCR (siliciumstyret ensretter)]()
2024-04-22
Siliciumkontrollerede ensretter (SCR) eller tyristorer spiller en central rolle inden for effektelektronik -teknologi på grund af deres ydeevne og p... -
LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger
![LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger]()
2024-07-15
LR621 og SR621SW -knapbatterier er udbredt i kompakte elektroniske enheder som ure, små legetøj, regnemaskiner og fjerntaster.Flere producenter prod... -
En komplet guide til multiplexere og deres rolle i digitale systemer
![En komplet guide til multiplexere og deres rolle i digitale systemer]()
2025-09-20
Multiplexere er komponenter i digitale systemer, designet til at kanalisere flere indgangssignaler til en enkelt outputlinie ved hjælp af binære log... -
Grundlæggende om op-amp-kredsløb
![Grundlæggende om op-amp-kredsløb]()
2023-12-28
I den indviklede verden af elektronik fører en rejse ind i dens mysterier, der altid er til et kalejdoskop af kredsløbskomponenter, både udsøgte o... -
Sammenligning af NMOS- og PMOS -forskelle og applikationer
![Sammenligning af NMOS- og PMOS -forskelle og applikationer]()
2024-11-15
At forstå forskellene mellem NMOS og PMOS -transistorer er vigtige for at designe effektive kredsløb.NMOS (N-type metaloxid-halvleder) og PMOS (P-ty... -
CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide
![CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide]()
2025-09-15
Knapbatterier som CR2450 og CR2032 strøm mange hverdagens elektronik, fra ure og fjernbetjeninger til medicinske og industrielle enheder.Selvom de er...










Hot Dele
- ADS7807UB
- ML03510R7AAT2A
- SCD243110QCD
- TMP86P820U
- FZ2400R17HE4_B9
- XC7A100T-2FGG676I
- MAX1678EUA
- M80-5000000M2-04-PM1-00-000
- PCM9210PTR
- SST55VD020-60-C-MVWE-TM
- IDT71V256SA15PZI
- AT29C040A-12PI
- LT6301IFE#PBF
- 06033A120KAT4A
- ADN4604ASVZ-RL
- UCC2895QDWRQ1
- TMP47P1660VF
- IS42S16400D-7TLI
- MC9S08SH8CTGR
- ICS951001AFT
- SBL3130F
- C0402CH1C1R5C020BC
- TMP90C041AF
- UCC2808DTR-2G4
- 0603YD105MAT2A
- SKKT72/12E
- LM5007SDX/NOPB
- TPS51200DRCR
- CS0805KKX7R7BB225
- X9241UVIT1
- TSUMU18EL-LF
- S25FL032P0XMFI013
- CL05A475MP5NRNC
- 1812GA561KAT1A
- MT41J256M16RE-15E:D
- 06035A560GAT2A
- RT0805DRD07200RL
- S29AL016D70TAI010
- ICS93775BF
- 7MBR35SB060-50
- RP152L023B-TR
- CER0358B
- C2012C0G2E272J125AA
- HD64F36049GHV
- IS24C64B-2ZLI
- CMS8S6990
- SN74LVC2G17DBV
- XCS30-3TQG144C
- MAX13487EESAT
- LT3094EDD#PBF