- Dansk
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Hvordan IoT-enheder fungerer: Arkitektur, komponenter og præstationsfaktorer
Katalog
Hvordan en IoT-enhed fungerer
Et IoT-produkt er lettere at forstå, når det betragtes som en lukket, målbar løkke: det observerer den fysiske verden, konverterer det, det har observeret, til data, som elektronik kan håndtere, flytter disse data til et sted, hvor de kan fortolkes, og udløser derefter et svar. Mange teams begynder med at forfølge "forbindelse", og det er forståeligt, præsentationer ser flotte ud, når instrumentbrættet opdateres i realtid, men i marken vurderes enheden ud fra om den opfører sig på samme måde på dag 3, dag 30 og dag 300.
Løkken skal overleve dagligdagens begrænsninger, der ofte dukker op på de værste tidspunkter: begrænset strøm, uforudsigelig latenstid, interferens, omkostningsloft og udviklende sikkerhedserwartninger. Når løkken er designet med disse begrænsninger i tankerne, føles netværks- og cloudlagene som en ren forlængelse af produktet snarere end en kilde til overraskelser og skrøbelige kanttilfælde.
Mål: At vende et fysisk signal til et elektrisk
Ved kanten konverterer en sensor en variabel fra den virkelige verden til en elektrisk repræsentation, som enheden kan måle. Den variable kan være miljømæssig, mekanisk eller elektrisk, og sensorens opgave er at skabe et signal, der forbliver fortolkbart på tværs af temperaturændringer, vibrationer og installationsvariabilitet.
Variabler fra den virkelige verden, der ofte måles:
• Temperatur
• Vibration
• Tryk
• Lys
• Bevægelse
• Strøm
• Gaskoncentration
Sensorens output lander typisk i en af to kategorier, og valget påvirker alt downstream (frontend-design, sampling og støjtolerance).
Almindelige sensortyper:
• Analog: en kontinuerligt varierende spænding eller strøm
• Digital: pakkede målinger over I²C/SPI/UART
Uden laboratoriebetingelser afhænger målenøjagtighed af mere end selve sensoren. Installationsfaktorer som placering, monteringskraft, luftstrøm, nærliggende varmekilder, kabelruting og mekanisk kobling kan betydeligt påvirke resultaterne.
Målefejl skyldes ofte installationsproblemer snarere end sensorfejl. Fleksible monteringsoverflader eller resonante strukturer kan forvrænge data og skabe vildledende målinger. At betragte montering og mekanisk design som en del af målesystemet hjælper med at reducere fejlretningstid og forbedrer målenøjagtigheden.
Betingelse: Analog Front-End (AFE) og signalhygiejne
Mange enheder ruter rå sensorudgange gennem en analog front-end (AFE), før de digitaliseres. Dette trin former stille om resten af systemet arbejder med et stabilt, pålideligt signal eller med noget, der kun opfører sig i kontrollerede forhold.
Typiske AFE-funktioner:
• Biasing og referenceskabelse for at holde signalerne inden for ADC'ens gyldige inputområde
• Forstærkning (instrumentsforstærkere, gevinsttrin) for at gøre små signaler målelige
• Filtrering (lavpas, anti-alias filtrering) for at reducere støj og begrænse misvisende højfrekvent indhold
• Beskyttelse (ESD-strukturer, overspændingsbeskyttelse, indgangsklemmer) for at overleve ledningsfejl og håndtering
Virkelige driftsmiljøer introducerer ofte støjkilder som motorer, lange kabler, switch-regulatorer og nærliggende radioer. Disse effekter kan skabe målefejl, der kan synes tilfældige, indtil kilden er identificeret.
God jordforbindelse, korrekt afskærmning og grundlæggende anti-alias filtrering forbedrer ofte signalets kvalitet mere effektivt end kun at stole på kompleks softwarefiltrering. At håndtere støj ved kilden giver som regel mere pålidelige målinger og systemydelse.
Konvertering: ADC sampling med tilsigtede afvejninger
Når signalet er analogt, konverterer en ADC det til digitale prøver. Selve konverteringen er ligetil; hvad der ofte kræver erfaring, er at vælge samplingparametre, der fungerer godt under reelle batteri- og netværksgrænser.
To samplingvalg, der former downstream-adfærd:
• Samplingshastighed: hurtig nok til at fange fænomenet, men ikke så hurtig at det sluser strøm og producerer unødvendige data
• Opløsning: tilstrækkelig fin til at opdage meningsfulde ændringer uden at omdanne støj og drift til falsk præcision
Sampling fungerer bedst, når det betragtes som en systemniveau beslutning i stedet for en isoleret specifikation. Oversampling kan stille og roligt tvinge mere radioaktivitet (og radiotid er ofte det, der dræner batteriet først). Undersampling kan misse korte, operationsmæssigt meningsfulde begivenheder, trykspidser, påvirkninger, kortvarige forsinkelser, som brugerne husker, fordi det var i det øjeblik, noget gik galt.
Beregn: Microcontrollerbehandling, timing og edge-logik
En microcontroller (MCU) læser typisk sensordata på en disciplineret tidsplan ved hjælp af timere, afbrydelser og DMA, så enhedens timing forbliver konsekvent, selv når firmwaren vokser. Konsistent timing er en af de detaljer, der føles kedelige, indtil den dag du debugger et fejl i marken og indser, at "signal" faktisk var tidsplan jitter.
Almindelige MCU-siderbehandlingsopgaver:
• Digital filtrering (glidende gennemsnit, median, IIR) for at reducere jitter og outliers
• Kalibrering og kompensation (offsetkorrektion, temperaturkompensation, linearisering)
• Regelvurdering (tærskler, hysterese, debouncing) for at forhindre ustabil toggling
• Letvægts edge-analyse (funktionsekstraktion, anomalisk scoring, kompression) for at reducere båndbredde og cloud computing
En nyttig designmetode er at adskille måledata fra beslutningslogik. Sensorlæsninger kan variere på grund af normale fysiske forhold, mens stabil systemadfærd kan opretholdes gennem hysterese, timingvinduer og state-maskine kontrol. Denne adskillelse hjælper med at reducere falske alarm, forbedre systemets stabilitet og forhindre forkerte fejlinformationer, når der opstår midlertidige målevariationer.
Ikke alle beslutninger har fordel af at vente på cloud. Nogle handlinger er tidsfølsomme eller skadesundgåelsesorienterede, og at skubbe dem væk fra enheden fører typisk til ubehagelige fejlsituationer, når netværket er langsomt eller fraværende.
Eksempler, der typisk håndteres lokalt:
• Overstrømsafbrydelse; overophedningsbeskyttelse; motorstopdetektion
Cloud har tendens til at skinne, når opgaven drager fordel af bredere kontekst eller længere tidshorisonter.
Cloud-side beslutningskategorier:
• Langsigtet trendanalyse og forudsigende vedligeholdelse
• Tvær-enhed korrelation
• Modelopdateringer og flådebrede politikændringer
En praktisk regel, som team ofte konvergerer på, er ligetil: hvis en forsinket kommando plausibelt kunne føre til skade, bør enheden beskytte sig selv først og rapportere derefter. Den tilgang føles ofte konservativ på en god måde, især når du er den, der er på vagt under en netværksfejl.
Kommuniker: Radio/kablede forbindelser og applikationsprotokoller
Kommunikationslaget flytter telemetri til en telefon, gateway eller cloud-endepunkt. At vælge en forbindelsesteknologi handler mindre om, hvad der er trendy, og mere om, hvad der passer til det fysiske miljø, deploymentsmodellen og strømbudgettet.
Almindelige forbindelsesmuligheder:
• Wi‑Fi; BLE; Zigbee/Thread; cellular (LTE-M/NB-IoT); Ethernet
Over forbindelseshastigheden bruger enheder applikationsprotokoller til at strukturere og levere beskeder. Den rigtige protokol afhænger ofte af, om produktet har brug for streaming telemetri, konfigurationsworkflows eller kompatibilitet med eksisterende virksomhedssystemer.
Almindelige applikationsprotokoller:
• MQTT
• HTTP
Rigtige implementeringer tilbyder sjældent stabil forbindelse. Adgangspunktet genstarter, gateways forsvinder, mobil dækning skifter, og interferens kommer og går. Enheder føles langt mere pålidelige, når de kan buffere data, forsøge igen med tilbageholdelse (ikke på en måde, der DDOS'er netværket), og opretholde en klar adfærd for den senest kendte tilstand, så systemet forbliver forståeligt, når forbindelserne er imperfekte.
Telemetri er typisk beskyttet med TLS for fortrolighed og integritet. I mange produkter er den første sikkerhedsgevinst simpelthen at få kryptering tændt overalt, men holdbar sikkerhed går videre ved at gøre identitet og opdateringer håndterbare i hele enhedens livscyklus.
Almindelige sikkerhedsbyggesten:
• Unikke enhedsidentiteter og certifikatbaseret autentifikation
• Sikker nøgleopbevaring (sikre elementer eller MCU tillidszoner)
• Signeret firmware og sikker opstart for at reducere chancen for uautoriseret kodeeksekvering
Der er et mønster, som erfarne teams genkender (ofte efter at have lært det den hårde vej): sikkerhedsarbejde er meget mindre smertefuldt, når identitet, nøglehåndtering og opdateringsveje er designet tidligt. Når disse fundamenter planlægges fra starten, har enheden tendens til at forblive tjeneste i årevis, ikke kun indtil den første store feltopdatering.
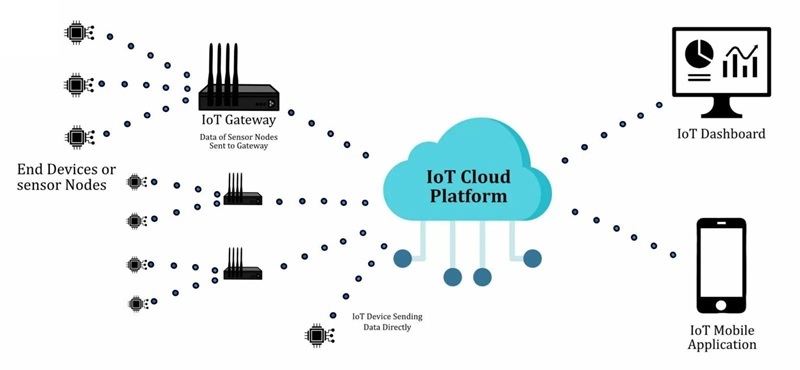
Cloud og Data
I skyen (eller på en lokal platform) opbevares data, ofte i tidsserie-systemer, derefter aggregeret og analyseret. Skyen er, hvor rå telemetri kan blive til output, som nogen faktisk vil handle på, hvad enten den nogen er en bruger, en operatør eller en automatiseret politikmotor.
Almindelige cloud-output:
• Advarsler (grænseoverskridelser, fejlregistrering)
• Forudsigelser (resterende nyttigt liv, driftregistrering)
• Dashboards (KPI'er, tendenser, flåde/enheds sundhed)
• Kontrolkommandoer (sætpunkter, tidsplaner, muliggøre/invalidere handlinger)
Skyens værdi er lettest at fange, når teams beslutter på forhånd, hvilke beslutninger dataene skal støtte. Uden den disciplin har telemetri en tendens til at blive dyr støj i baggrunden, indsamlet pålideligt, opbevaret pligtopfyldende, og derefter sjældent brugt med selvtillid.
Aktuer: Udføre kommandoer sikkert og gentageligt
Kommandoer sendt tilbage til enheden driver aktuatorer, og denne del af løkken er, hvor hardware virkeligheden bliver højlydt. Aktuering kræver driverkredsløb der matcher belastningen, og det gavner af sikkerhedslinjer, der gør fejl forudsigelige snarere end kaotiske.
Almindelige aktuatorer:
• Motorer
• Ventiler
• Relæer
• Varmelegemer
• LED'er
• Højtalere
Almindelige driver- og beskyttelseselementer:
• MOSFET'er; relæer; H-broer; triac'er (afhængigt af belastningskarakteristika)
• Flyback dioder og snubbere (til induktive belastninger)
• Strømregistrering og termisk beskyttelse
• Tilstandsv verificering når tilgængelig (begrænsningskontakter, positionsfeedback, elektriske signaturer)
En pålidelig tankegang, der ofte betaler sig, er at antage, at aktuering er, hvor risikoen koncentreres. Sensorer fejler ofte stille; aktuatorer kan fejle på måder, brugerne straks lægger mærke til. Enkle sikkerhedsforanstaltninger, timeout, interlocks, sanity checks forhindrer ofte kaskadeproblemer og får systemet til at føles mere troværdigt under de uundgåelige mærkelige grænsetilfælde.
Løkken gentages
Denne cyklus; beregn, kommuniker, aktuér gentages kontinuerligt. Lokalt kan det køre på millisekunder; en cloud-returrejse kan tage sekunder afhængigt af netværket og backend-belastningen. Gode produkter behandler timing og strøm som designinput, der former hver anden beslutning, snarere end som eftertanker der skal optimeres til sidst.
Almindelige systemniveau strategier:
• Brug edge-behandling til at reducere unødvendige transmissioner
• Batch- og komprimer telemetri når latenstolerance tillader det
• Sov aggressivt og vågn forudsigeligt på batteridrevne enheder
• Oprethold "minimum levedygtig adfærd", selv når skyen ikke kan nås
En holdbar IoT-enhed defineres ikke af nogen enkelt komponent. Den defineres ved, hvor stille hele løkken opfører sig, når virkeligheden divergerer fra planen: støjende signaler, intermitterende netværk, aldrende hardware og uforudsigelig brugeradfærd. At designe med de betingelser in mente er ofte forskellen mellem en demonstration, der fungerer én gang, og et produkt, der bevarer sin ro år efter år.
Elektroniske komponenter på IoT-enhedens ydelse
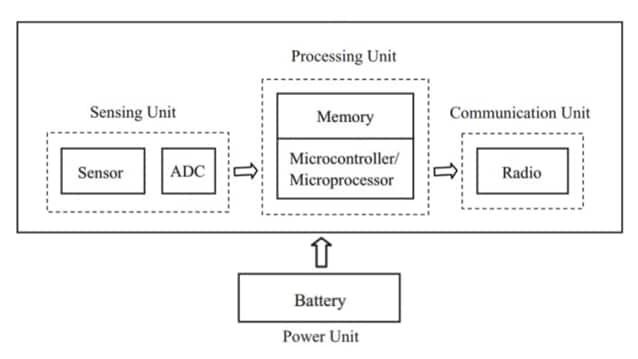
IoT-hardware føles kun pålidelig, når sensorinput, beregning, lagring, strømlevering og forbindelse formes til én sammenhængende signal- og strømbane.
En sensoraflæsning forbliver sjældent meningsfuld, hvis reference spændingen skifter, hvis klokken jitter, eller hvis dataplanen lejlighedsvis taber bytes under belastning. En radiolink forbliver sjældent brugbar, hvis forsyningen svigter under transmissionsudbrud, hvis oscillatoren er støjende, eller hvis credential håndtering er inkonsistent på tværs af resets.
Mange hold lærer, at pålideligheden ofte forbedres mere ved at stramme grænserne mellem blokke end ved at tilføje en anden funktion: forudsigelige skinner, afgrænsede tidspunkter, kontrolleret støjkopling, og fejladfærd der er forståelig, når noget går galt.
Designmålet er ikke "perfekte dele", men grænseflader der opfører sig på samme måde på en udviklerbænk, i pilotudrulninger, og måneder senere i marken.
Sensor
Sensorer omdanner virkelige forhold til elektriske signaler, men dag-til-dag produktadfærd formes af detaljer, der kan se små ud, indtil feltdata gør dem ubehageligt store.
Støj, drift, montering, luftstrøm, kondensation og kabelføring har alle en måde at vende et rent laboratorieplot til rodet distributioner, som firmwaren må overleve.
Rækkevidde og opløsning skal passe til den beslutning der træffes, ikke en overskriftspecifikation. Overfølsomme konfigurationer forstærker ofte støj og drift, hvilket har en tendens til at hæve falske positive og stille øge beregningstiden og radio airtime. En så stram som muligt rækkevidde kan se forsvarlig ud under designgennemgange, men feltadfærd favoriserer ofte en lidt bredere rækkevidde, der producerer mere stabile, mere fortolkelige målinger. Hvis en downstream-model eller tærskel alligevel skal udglatte dataene, kan det føles tilfredsstillende at presse rå følsomhed for langt i starten og derefter frustrerende, når supportbilletter ankommer.
Drift, aldring og eksponering bestemmer, om målinger forbliver troværdige efter måneder eller år.
Kalibrering fungerer generelt bedre, når det behandles som en livscyklusrutine snarere end et enkelt fabriksritual, som alle håber vil holde for evigt.
• Fabrikkalibrering med gemte koefficienter.
• Omkalibreringsudløsere i marken (planlagt, hændelsesbaseret eller teknikerassisteret).
• Selvkontrolrutiner der flagger outliers, clipping og saturation.
Hold, der sigter mod servicetilpassede produkter, bruger ofte beskedent flash og beregning til kalibreringsmetadata, sporbarhed og sundhedstjek, fordi det er billigere end at forklare inkonsistente aflæsninger efter udrulning.
Valg af samplinghastighed bliver normalt en forhandling mellem fysik, batteri og databrugbarhed. At sampel for langsomt risikerer aliasing og missede hændelser, som kan være svære at diagnosticere, fordi dataene stadig ser plausible ud. At sampel for hurtigt øger strømforbruget og datavolumen, og det kan skabe illusionen af bedre indsigt uden væsentligt at forbedre beslutninger.
Et mønster, der holder godt, er at fange fænomenet med tilstrækkelig margen, filtrere tidligt (analogt når det virkelig hjælper, digitalt når det er tilstrækkeligt), og nedprøve til rapportering.
Dette resulterer ofte i bedre batteriresultater end at sampel aggressivt og håbe på, at cloud-analyse kompenserer senere.
Om en ekstern ADC er berettiget, afhænger normalt af opløsning, indgangsimpedans, referencestabilitet og støjtolerance. MCU-integrerede ADC'er fungerer ofte godt til midtopløsningsmæssig måling, mens præcise signaler har tendens til at straffe tilfældig layout og valg af reference.
• Valg af lav-støj reference og referenceføring.
• Jording strategi, beskyttelsesbaner, og returstyring.
• Afdækning og intentionel kabelføring nær stik.
• ESD-beskyttelse placeret hvor det faktisk krydser det transient.
Små PCB-ændringer kan målbart reducere jitter og forbedre gentagelighed, især for højimpedanskilder eller lavniveau-analoge signaler, hvor "næsten fin" bliver synligt ustabil i produktionsdata.
Mikrokontroller (MCU)
MCU'en fungerer som det operationelle center: den aflæser sensorer via GPIO, I²C, SPI, og UART; betinger signaler; kører inferens hvor det er relevant; styrer strømtilstande; og driver output.
Når MCU-adfærd er forudsigelig, føles hele enheden rolig; når den ikke er, ser fejl ofte tilfældige ud, selv når årsagen er deterministisk.
Stabil firmware kommer typisk fra eksplicitte tilstands-maskiner og timing, der har klare grænser. Hændelsesdrevne design, der bruger interrupts, DMA og timere, slår normalt polling-sløjfer på reaktivitet og energi, især i enheder der sover ofte.
Når hold beskriver tilfældige låsninger, er gerningsmanden ofte en af få gentagne overtrædere: ubegrænset arbejde inde i en interrupt, delt bus deadlock, prioriteringsomvending, eller hukommelsesfragmentering, der aldrig blev stress-testet under lange driftstider.
RAM- og flashplanlægning fungerer bedre, når det inkluderer, hvad der sker efter den første demo lykkes.
• Netværksbuffer og TLS-overhead (inklusive værst mulige håndtryksadfærd).
• Logging, metric og crash-dumps som ingeniører vil bede om senere.
• OTA staging-plads, plus metadata til integritetskontroller.
• Feature creep der forudsigeligt ankommer efter pilot feedback.
Undersized hukommelse forbliver ofte stille i starten og bliver så smertefuld senere, lige når diagnostik og opdateringssikkerhed bliver de vigtigste værktøjer til at kontrollere felt risiko.
Enheder der forventes at blive betroet, drager typisk fordel af sikker boot, beskyttet nøglelagring, hardware kryptografi acceleration, og en ægte tilfældig talgenerator. Fra implementeringserfaring føles sikkerheds retrofitter ofte ubehagelige, fordi de kolliderer med sendte hardware restriktioner og langsigtede legitimationsoplysninger.
Valg af en MCU (eller tilføjelse af et sikkert element) der understøtter stærk identitet og målt boot reducerer ofte mængden af intelligent software der er nødvendig for at kompensere for svage tillidsrodfundamenter.
Adgang for SWD/JTAG og praktisk testbarhed afgør ofte om tidlig produktion er kontrolleret eller kaotisk.
• SWD/JTAG adgangsplanlægning og lånestrategi for produktion.
• Testpads og probe-venligt layout til højvolumen fixtures.
• Strøm-skinne følepunkter og målelige noder til hurtig triage.
En lille mængde testinfrastruktur kan spare teams for uger med ubehagelig gætning, når den første store batch afslører hjørnetilfælde der aldrig dukkede op på håndbyggede prototyper.
Kommunikationsmoduler
Kommunikationsmodulet former mere end linkbudget: det påvirker provisionering, opdateringsadfærd, supportarbejdsgange og et overraskende antal fejltilstande.
I batteridrevne enheder dominerer radios adfærd ofte energiforbruget, så beslutninger om tilslutning tenderer til at blive batterilevnstilstande i forklædning.
Udvælgelse balancerer typisk rækkevidde, latency, throughput, topologi og strømbudget med et ærligt blik på operationel friktion.
• BLE til kort rækkevidde, lavt strømforbrug og smartphone commissioning.
• Wi‑Fi til højere throughput med højere spidsstrøm og strammere strømintegritetskrav.
• Thread/Zigbee til mesh-netværk og lavenergi hjem-/industrielle implementeringer.
• LoRaWAN til lang rækkevidde, lave datahastigheder og streng nyttelastdisciplin.
• LTE‑M/NB‑IoT til dækning over store områder med operatørrestriktioner og mere kompleks provisionering.
Teams føler ofte lettelse, når de indrømmer, at "radio valg" er uadskilleligt fra firmware retry-strategi, spidsstrømhåndtering og brugerens tålmodighed under opsætning.
Et stærkt modul kan stadig skuffe, hvis antennen er dårligt placeret, ude af tuning af indkapslingen, eller udsat for støjende jordreturer.
• Antenne keep-out zonering og kontrolleret impedans routing.
• Indkapslingseffekter og bruger-interaktions testning.
• Radiated emissions checks og følsomhed probing.
Når link marginen er tynd, kan firmware retries maskere symptomet i et stykke tid, men batterikostnaden akkumuleres på en måde, som operationsteams bemærker længe før ingeniører ser det i et laboratorium.
Tilslutningsdesign skal overleve reelle arbejdsgange frem for ideelle demoer.
• Provisionering der tolererer delvise fejl og almindelige brugerfejl.
• Backoff og retry-logik der undgår selvforskyldt batteridræns spiral.
• Roaming adfærd plus SIM/eSIM livscyklusstyring for mobile enheder.
• OTA med autentificering, rollback, og båndbredde-bevidst planlægning.
OTA fungerer mindre som en skinnende funktion og mere som en langsigtet vedligeholdelseskanal; når det behandles afslappet, har enheder tendens til at blive dyre at støtte, selvom den første rollout ser fin ud.
Strømstyring
Strømdesign holder enheden i live, gentagelig og kedelig, i ordets bedste forstand. Det spænder over regulatorer, opladning, brændstofmåling, belastningsswitching, og beskyttelsesvalg der skal håndtere både spidsstrømhændelser og dyb-søvn forventninger.
Buck/boost/LDO valg drager fordel af at evaluere effektivitet over hele belastningsområdet, ikke kun et enkelt driftspunkt. Søvn-tilstandens hvilende strøm afgør ofte om et produkt opfylder batteri forventninger.
Radioer kan skabe skarpe strømspidser; bulk kapacitans, lav-impedans routing, og stabile kontrolsløjfer beslutter ofte om systemet forbliver oppe under transmissionspludselser. Mange mystiske resetter kan spores tilbage til transiente droops frem for firmware, hvilket kan være en ydmygende, men nyttig lektie under integration.
Batterilevetid vindes ofte under søvn, hvor små lækager kumuleres i målbare tab.
• Dyb søvn konfiguration med kun de vækkekilder der virkelig bruges.
• RTC eller lavstrøm timere til periodiske vækninger.
• GPIO eller sensor interrupts til begivenheds-drevne vækninger.
• Strøm gating for sensorer og perifere enheder der ikke behøver kontinuerlig bias.
Måling af søvn i realtid på rigtige hardware og derefter behandle uventede mikroampere-stigninger som fejl, har tendens til at forhindre den langsomme krybning, hvor mange "næsten slukket" blokke stille og roligt nedbryder driftstiden.
Valget af opladnings-IC afhænger af kemi, termiske grænser, lovgivningsmæssige begrænsninger og det forventede miljø. Valget af brændstofmåler skal afspejle nøjagtighedsbehov på tværs af temperatur, belastning og aldring. For udendørs eller uopvarmede installationer bliver adfærd ved lave temperaturer ofte drivkraften for den opfattede kvalitet, så konservative spændingsgrænser og ærlig kapacitetsrapportering reducerer klager over pludselige nedlukninger.
Overstrøm, overspænding, omvendt polaritet og ESD-adfærd bør betragtes som rutinemæssige driftsbetingelser for mange installationer. Industrielle miljøer producerer ofte kabeludladningsbegivenheder og induktive transiente, der kan se ud som "dårligt held", medmindre designet forudser dem. Passende klemmer, sikringer, TVS-dioder, inrush-kontrol og isoleringsbeslutninger afgør ofte, om en enhed overlever sin første måned med et intakt rygte.
Lagringskomponenter
Lageret rummer firmware, konfiguration, certifikater og logfiler. Valget mellem NOR/NAND flash, EEPROM, FRAM, eMMC eller microSD drives ofte af holdbarhed, ydeevne, BOM-omkostninger og hvor smertefuld en korrumperet skrivning ville være operationelt.
Rigtige enheder står over for spændingsfald, watchdog-reset og delvise skriver.
• Tjekksum eller CRC for konfiguration og logfiler.
• Slidudjævning eller begrænset skrivefrekvens for flash-baserede medier.
• Journaling eller append-only optegnelser for data, der ikke kan skrives halvt.
Et hyppigt driftsmønster er ring-buffer logging med begrænsede skrivehastigheder, hvilket begrænser stille slidforbrug, mens der stadig efterlades tilstrækkeligt med breadcrumbs til at fejlfinde feltproblemer.
A/B firmware slots plus verificeret boot og rollback-logik giver et praktisk sikkerhedsnet under afbrudte opdateringer. Uden disse sikkerhedsforanstaltninger kan et enkelt strømmistab under en opdatering strande enheder i marken. Produkter, der skalerer glat, behandler typisk genopretning på samme niveau som forsendelsesfunktioner, fordi supportomkostninger ofte følger kvaliteten af genopretningshistorien.
Certifikater og nøgler bør opbevares med tampermodstand og adgangskontrol for øje, ikke blot et eller andet sted ikke-flygtigt. Selv med sikker opbevaring mindsker planer for nøglerotation, tilbagekaldelse og hændelsesrespons langvarig eksponering, når en legitimationsoplysning lækker, eller en flåde delvist er kompromitteret.
Interface-komponenter
LED'er, displays, knapper, mikrofoner, kameraer og biometriske sensorer former brugervenligheden, men de trækker også strøm, EMI-risiko og privatlivsforhold ind. En UI, der føles konsekvent under stress, afspejler ofte disciplineret elektrisk design mere end UI-polering.
Knapper har tendens til at have brug for debouncing og ESD-beskyttelse for at undgå sporadiske fejllæsninger.
Mikrofoner og kameraer har tendens til at have brug for rene skinner og forsigtig jordforbindelse for at undgå intermitterende artefakter, som brugerne fortolker som "uskrevne."
• Adskillelse af følsomme analoge baner fra højstrømsstrømskift og RF-baner.
• Planlægning af returbane for at begrænse støjkobling.
• Afskærmnings- og filtreringsvalg, der matcher indkapslingen og kabelstrategien.
Intermitterende UI-fejl skyldes ofte kobling fra radioer eller motorer, og det kan være overraskende tilfredsstillende at løse dem med layout og jordforbindelse disciplin snarere end endeløse firmware-arbejdsomgange.
Enheder opfører sig mere forudsigeligt, når de har en offline-historie, der ikke er afhængig af, at netværket er tilgængeligt.
Klar lokal feedback (entydige LED-tilstande og minimal, præcis fejlsignalisering) plejer at reducere supportbyrden og undgå den brugervanskelighed, der kommer fra stille fejladfærd.
Aktuatorer
Aktuatorer omdanner kontrolintention til bevægelse, varme eller kraft, og de kræver normalt interfacekredsløb ud over en direkte MCU-pin. Fordi aktuatorer interagerer med den fysiske verden, har fejlsituationer tendens til at være synlige, kostbare og følelsesmæssigt eskalerende for brugerne. Motorer, solenoider, ventiler og relæer har ofte brug for MOSFET-trin, H-broer eller dedikerede driver IC'er, der er dimensioneret til reelle strømme og transiente.
• Flyback-dioder eller snubbers til induktive belastninger.
• Strømføling til stall-detektion og overbelastningsrespons.
• Termiske designhensyn til kontinuerlige eller højduty belastninger.
Feltoplevelsen viser ofte aktuatorrelaterede problemer som en hyppig fejlkilde, og konservativ nedgradering samt fejlfinding har tendens til at forbedre flådes opførsel på en måde, som supportteam bemærker hurtigt.
En enhed skal forblive sikker, når firmware crasher, skyen er utilgængelig, eller kommandoer ankommer for sent.
• Watchdogs og reset-strategi i overensstemmelse med sikre udgange.
• Default-sikre output-tilstande defineret pr. aktuator og pr. tilstand.
• Mekaniske fail-safe positioner hvor applikationen kræver det.
De mest modstandsdygtige designs betragter tab af forbindelse som en normal driftsmode og definerer nøjagtigt, hvad aktuatoren gør i den periode, så adfærden forbliver forudsigelig, selv når alt andet er ufuldkommen.
Systemniveauintegration
Store forbedringer kommer ofte fra integrationspraksisser, der tvinger hele systemet til at fortælle sandheden tidligt.
• Validering af strømintegritet under værst tænkelig radio- og aktuatorbelastning.
• Støjkontrol på tværs af analog sensning, switch-regulatorer og højstrømsdrivere.
• Boot, opdatering og genoprettelsesflow med målbare tilstande og klar observabilitet.
• Miljøtest (temperatur, fugtighed, vibration) valgt til at matche faktiske deploymentsforhold.
Når disse aktiviteter betragtes som dagligt ingeniørarbejde i stedet for ceremonier i slutningen af fasen, bliver komponentvalg normalt mindre dramatiske, og enhedens adfærd forbliver tendentielt konsistent fra prototype til masseudrulning.
Konklusion
Succesfulde IoT-systemer er afhængige af en fuldstændig og pålidelig dataloop, der inkluderer sensning, signalbehandling, behandling, kommunikation, sikkerhed og strømstyring. Hver fase påvirker den samlede ydeevne, batterilevetid, nøjagtighed og brugeroplevelse. Ved at balancere hardware, firmware, netværk og operationelle begrænsninger kan IoT-enheder levere pålidelig overvågning, kontrol og automatisering på tværs af en bred vifte af applikationer.
Ofte stillede spørgsmål [FAQ]
1. Hvorfor fejler mange IoT-projekter på grund af målekvalitet snarere end forbindelsesproblemer?
Forbindelse får ofte det meste af opmærksomheden under udviklingen, fordi dashboards og cloud-integrationer er meget synlige. Men unøjagtige målinger forårsaget af dårlig sensorplacering, vibration, luftstrømsvirkninger, termisk kobling, støj eller installationsfejl kan underminere hele systemet. Hvis de oprindelige data er upålidelige, kan selv de mest avancerede analyser, cloud-platforme og kommunikationsnetværk ikke producere betroede beslutninger. Langsigtet IoT-succes begynder normalt med stabile målinger snarere end sofistikerede forbindelsesfunktioner.
2. Hvorfor bør sensorinstallationen betragtes som en del af selve sensorsystemet?
Sensore måler fysiske forhold gennem deres interaktion med det omgivende miljø. Monteringens kraft, kapseldesign, kabelrouting, luftstrøm, vibrationsoverførsel og termisk kontakt kan alle ændre, hvad sensoren opfatter. En perfekt kalibreret sensor kan stadig producere misvisende aflæsninger, hvis den er dårligt monteret. I mange implementationer bidrager installationsrelaterede fejl til mere måleusikkerhed end sensorens specifikationer selv, hvilket gør mekanisk integration til en kritisk del af den samlede sensorydelse.
3. Hvorfor er oversampling ofte en skjult trussel mod batterilevetid i IoT-enheder?
At sampling data oftere end nødvendigt øger behandlingsarbejdet, hukommelsesforbruget og kommunikationsaktiviteten. Da trådløs transmission ofte er den største energiforbruger i batteridrevne IoT-produkter, kan indsamling af overdreven data indirekte øge radioforbruget og reducere driftstiden. Selvom høje samplinghastigheder kan synes at forbedre nøjagtigheden, skaber de ofte større datasæt uden at levere meningsfulde forbedringer i beslutningskvaliteten. Effektive samplingstrategier balancerer kravene til begivenhedsdetektering mod strømforbrug og rapporteringsbehov.
4. Hvorfor adskiller succesfulde IoT-enheder målogik fra beslutningstagninglogik?
Rå sensorværdier fluktuerer naturligt på grund af støj, miljøvariation og normal procesadfærd. Hvis hver måling direkte udløser en handling, kan systemer blive ustabile og generere falske alarmer. Ved at adskille måleindsamling fra beslutningslogik ved hjælp af hysterese, tilstandsmaskiner, filtrering, timing-vinduer og valideringsregler kan enheder forblive responsive, mens de undgår unødvendige reaktioner på midlertidige fluktuationer. Denne tilgang forbedrer pålideligheden og skaber mere forudsigelig systemadfærd i virkelige forhold.
5. Hvorfor behandles mange kritiske IoT-beslutninger lokalt i stedet for at blive delegeret til skyen?
Sky-systemer leverer værdifuld langsigtet analyse, flådestyring og forudsigelige indsigter, men netværksforsinkelser og -udfald kan gøre dem uegnede til tidsfølsomme beskyttelsesfunktioner. Begivenheder som overstrømsforhold, overophedning, motorstop eller sikkerhedslukninger kræver ofte øjeblikkelig handling. At vente på skybekræftelse kan tillade, at udstyrsbeskadigelse eller usikre forhold udvikler sig. Af denne grund udføres kritiske beskyttelses- og kontrolbeslutninger ofte ved kanten, mens skyplatforme fokuserer på overvågning og optimering.
Relateret blog
-
Hvor mange nuller på en million, milliarder, billioner?
![Hvor mange nuller på en million, milliarder, billioner?]()
2024-07-29
Million repræsenterer 106, en let forståelig figur sammenlignet med hverdagens varer eller årlige lønninger. Milliarder, svarende til 109, begynde... -
IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout
![IRLZ44N MOSFET datablad, kredsløb, ækvivalent, pinout]()
2024-08-28
IRLZ44N er en bredt brugt N-kanals magt MOSFET.Det er kendt for sine fremragende switching -kapaciteter, det er meget egnet til adskillige anvendelser... -
Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?
![Batteritemperatur for lav, opladningen stoppede.Hvordan løser jeg det?]()
2024-10-06
Problemer med opladning af mobiltelefonbatteri er almindelige, men kan styres effektivt.Temperaturen spiller en stor rolle i batterieffektiviteten, da... -
BC547 Transistor Comprehensive Guide
![BC547 Transistor Comprehensive Guide]()
2024-07-04
BC547 -transistoren bruges ofte i en række elektroniske applikationer, der spænder fra grundlæggende signalforstærkere til komplekse oscillatorkre... -
Omfattende guide til SCR (siliciumstyret ensretter)
![Omfattende guide til SCR (siliciumstyret ensretter)]()
2024-04-22
Siliciumkontrollerede ensretter (SCR) eller tyristorer spiller en central rolle inden for effektelektronik -teknologi på grund af deres ydeevne og p... -
LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger
![LR621, SR621SW, 364, AG1 Batteryækvivalenter og udskiftninger]()
2024-07-15
LR621 og SR621SW -knapbatterier er udbredt i kompakte elektroniske enheder som ure, små legetøj, regnemaskiner og fjerntaster.Flere producenter prod... -
En komplet guide til multiplexere og deres rolle i digitale systemer
![En komplet guide til multiplexere og deres rolle i digitale systemer]()
2025-09-20
Multiplexere er komponenter i digitale systemer, designet til at kanalisere flere indgangssignaler til en enkelt outputlinie ved hjælp af binære log... -
Grundlæggende om op-amp-kredsløb
![Grundlæggende om op-amp-kredsløb]()
2023-12-28
I den indviklede verden af elektronik fører en rejse ind i dens mysterier, der altid er til et kalejdoskop af kredsløbskomponenter, både udsøgte o... -
Sammenligning af NMOS- og PMOS -forskelle og applikationer
![Sammenligning af NMOS- og PMOS -forskelle og applikationer]()
2024-11-15
At forstå forskellene mellem NMOS og PMOS -transistorer er vigtige for at designe effektive kredsløb.NMOS (N-type metaloxid-halvleder) og PMOS (P-ty... -
CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide
![CR2450 vs CR2032 Sammenligning: Alt hvad du behøver at vide]()
2025-09-15
Knapbatterier som CR2450 og CR2032 strøm mange hverdagens elektronik, fra ure og fjernbetjeninger til medicinske og industrielle enheder.Selvom de er...










Hot Dele
- 2MBI200TA-060-50
- EP2AGX190FF35C4NAA
- S9S12G128F0MLF
- HD6413003F16
- SAB82532NV3.2
- M36LOR7050U3ZS
- CD4051BM
- M24C32-FMC6TG
- TUSB211IRWBR
- CY8C22345-24SXIT
- TAP476M020HSB
- MAX706RCUA
- GT-48302A-B-0
- LM2664M6/NOPB
- INA322EA/2K5
- LM7321MAX
- ICS9179CF-06
- CGA4J1X7R1V155M125AC
- MGA-68563-BLKG
- HS25 15R J
- AD5666BRUZ-1
- ML9208A-14GAZ0ARL
- CC1210KKX7R9BB473
- 06031A330KAT2A
- MBCG47323-112PMT-G
- ISPLSI1024-60LJ
- 2MBI75F-060
- TRJC476K010RRJ
- CD74HC112PWR
- GRJ55DR72E474KWJ1L
- 10M08SCU169A7G
- GCM32EC71H106KA03L
- L-APP550E-3-1B12-DB
- 08055A301FAT2A
- LT1014CN#PBF
- T4260-ILQH
- CY8C4247AZI-M485
- PIC16F886-I/SO
- MC10H176MELG
- LM2742MTC
- V375B5C150BL
- RPS-120-24
- VI-2N1-EX
- CN80617004461AB
- FSTU6800QSC
- MT5392TCG
- T817E001
- MC34074VD-R2
- HD64F38086RW10V
- CH7013A-TRUF